

Analyzing gait data measured by wearable cyborg hybrid assistive limb during assisted walking: gait pattern clustering
- PMID: 39736922
- PMCID: PMC11682894
- DOI: 10.3389/fmedt.2024.1448317
Analyzing gait data measured by wearable cyborg hybrid assistive limb during assisted walking: gait pattern clustering
Abstract
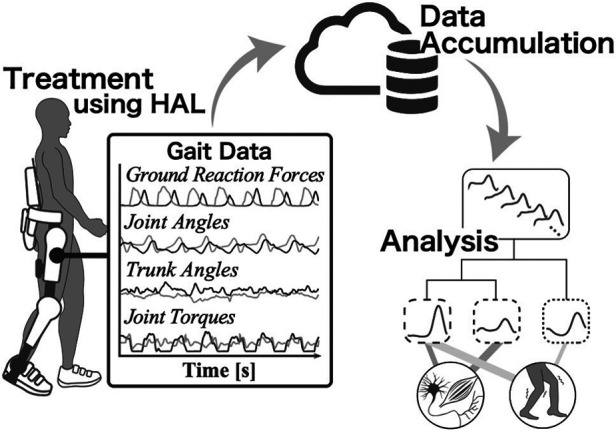
Introduction: The wearable cyborg Hybrid Assistive Limb (HAL) is a therapeutic exoskeletal device that provides voluntary gait assistance using kinematic/kinetic gait data and bioelectrical signals. By utilizing the gait data automatically measured by HAL, we are developing a system to analyze the wearer's gait during the intervention, unlike conventional evaluations that compare pre- and post-treatment gait test results. Despite the potential use of the gait data from the HAL's sensor information, there is still a lack of analysis using such gait data and knowledge of gait patterns during HAL use. This study aimed to cluster gait patterns into subgroups based on the gait data that the HAL automatically collected during treatment and to investigate their characteristics.
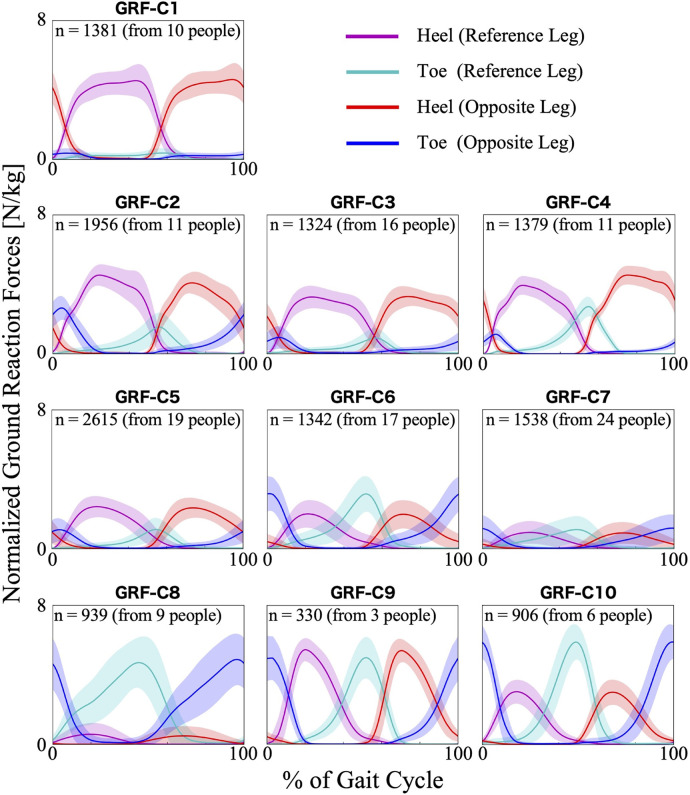
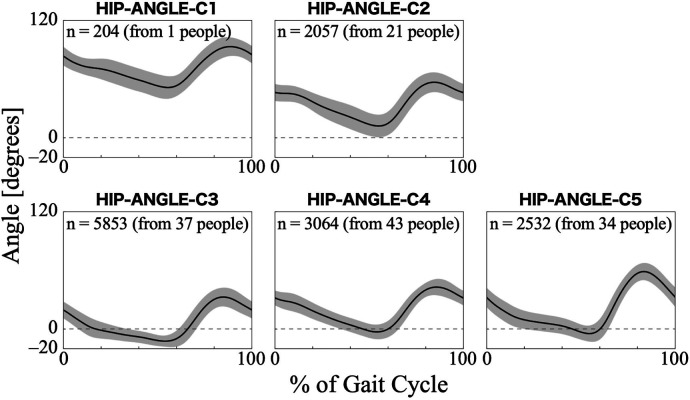
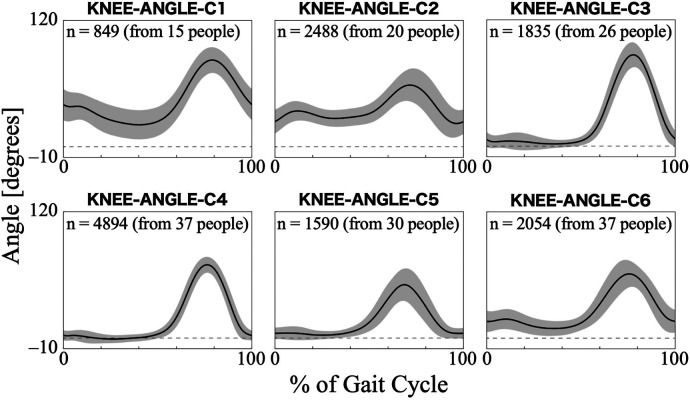
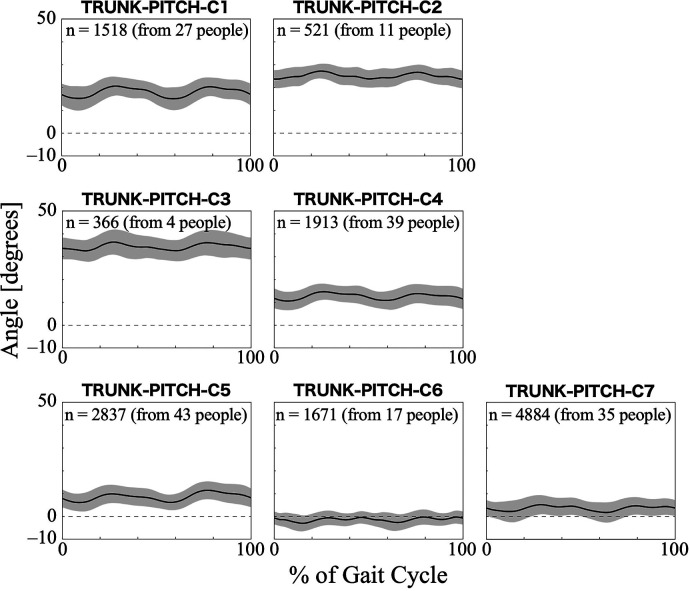
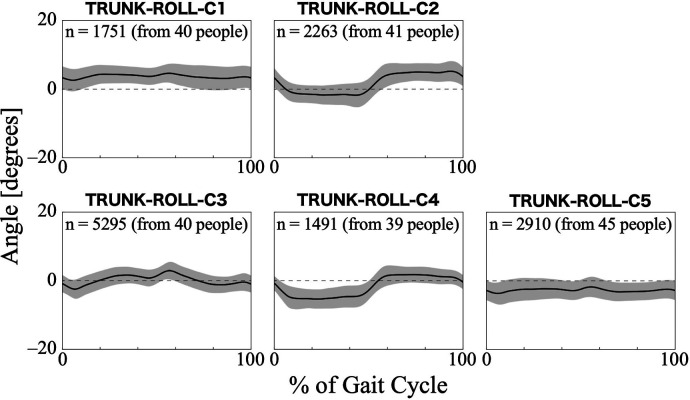
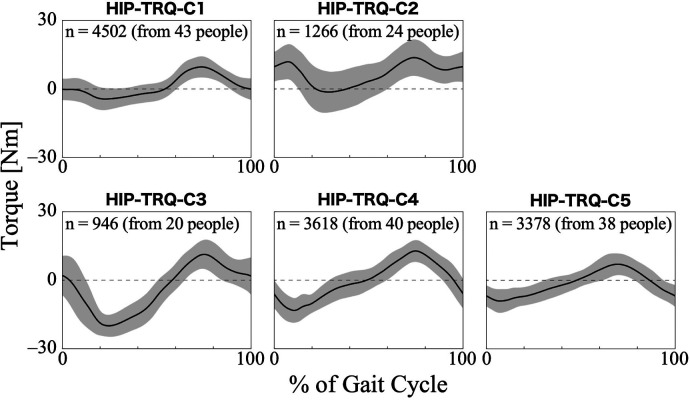
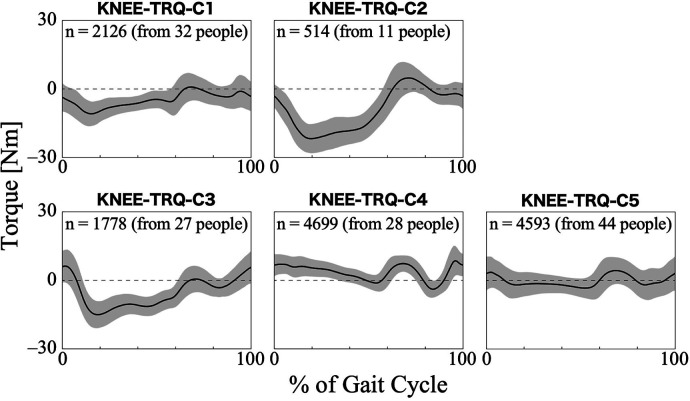
Methods: Gait data acquired by HAL, including ground reaction forces, joint angles, trunk angles, and HAL joint torques, were analyzed in individuals with progressive neuromuscular diseases. For each measured item, principal component analysis was applied to the gait time-series data to extract the features of the gait patterns, followed by hierarchical cluster analysis to generate subgroups based on the principal component scores. Bayesian regression analysis was conducted to identify the influence of the wearer's attributes on the clustered gait patterns.
Results: The gait patterns of 13,710 gait cycles from 457 treatments among 48 individuals were divided into 5-10 clusters for each measured item. The clusters revealed a variety of gait patterns when wearing the HAL and identified the characteristics of multiple sub-group types. Bayesian regression models explained the influence of the wearer's disease type and gait ability on the distribution of gait patterns to subgroups.
Discussion: These results revealed key differences in gait patterns related to the wearer's condition, demonstrating the importance of monitoring HAL-assisted walking to provide appropriate interventions. Furthermore, our approach highlights the usefulness of the gait data that HAL automatically measures during the intervention. We anticipate that the HAL, designed as a therapeutic device, will expand its role as a data measurement device for analysis and evaluation that provides gait data simultaneously with interventions, creating a novel cybernics treatment system that facilitates a multi-faceted understanding of the wearer's gait.
Keywords: cybernics treatment; gait analysis; hierarchical clustering; hybrid assistive limb (HAL); neuromuscular diseases; wearable devices.
© 2024 Namikawa, Kawamoto, Uehara and Sankai.
Conflict of interest statement
All authors report having been paid by CYBERDYNE Inc. in the past or present.
Figures
Similar articles
-
Long-term effects of the gait treatment using a wearable cyborg hybrid assistive limb in a patient with spinal and bulbar muscular atrophy: a case report with 5 years of follow-up.Front Neurol. 2023 Jun 8;14:1143820. doi: 10.3389/fneur.2023.1143820. eCollection 2023. Front Neurol. 2023. PMID: 37360345 Free PMC article.
-
Cybernic treatment with wearable cyborg Hybrid Assistive Limb (HAL) improves ambulatory function in patients with slowly progressive rare neuromuscular diseases: a multicentre, randomised, controlled crossover trial for efficacy and safety (NCY-3001).Orphanet J Rare Dis. 2021 Jul 7;16(1):304. doi: 10.1186/s13023-021-01928-9. Orphanet J Rare Dis. 2021. PMID: 34233722 Free PMC article. Clinical Trial.
-
Effects of gait training with a voluntary-driven wearable cyborg, Hybrid Assistive Limb (HAL), on quality of life in patients with neuromuscular disease, able to walk independently with aids.J Clin Neurosci. 2021 Jul;89:211-215. doi: 10.1016/j.jocn.2021.04.038. Epub 2021 May 15. J Clin Neurosci. 2021. PMID: 34119269
-
Efficacy and Safety Study of Wearable Cyborg HAL (Hybrid Assistive Limb) in Hemiplegic Patients With Acute Stroke (EARLY GAIT Study): Protocols for a Randomized Controlled Trial.Front Neurosci. 2021 Jul 2;15:666562. doi: 10.3389/fnins.2021.666562. eCollection 2021. Front Neurosci. 2021. PMID: 34276288 Free PMC article.
-
Robot-assisted training using Hybrid Assistive Limb® for cerebral palsy.Brain Dev. 2018 Sep;40(8):642-648. doi: 10.1016/j.braindev.2018.04.004. Epub 2018 Jul 14. Brain Dev. 2018. PMID: 29773349
References
-
- Nakajima T, Sankai Y, Takata S, Kobayashi Y, Ando Y, Nakagawa M, et al. Cybernic treatment with wearable cyborg hybrid assistive limb (HAL) improves ambulatory function in patients with slowly progressive rare neuromuscular diseases: a multicentre, randomised, controlled crossover trial for efficacy and safety (NCY-3001). Orphanet J Rare Dis. (2021) 16(1):304. 10.1186/s13023-021-01928-9 - DOI - PMC - PubMed
-
- Okawara H, Sawada T, Matsubayashi K, Sugai K, Tsuji O, Nagoshi N, et al. Gait ability required to achieve therapeutic effect in gait and balance function with the voluntary driven exoskeleton in patients with chronic spinal cord injury: a clinical study. Spinal Cord. (2020) 58(5):520–7. 10.1038/s41393-019-0403-0 - DOI - PubMed
LinkOut - more resources
Full Text Sources