

Balance recovery schemes following mediolateral gyroscopic moment perturbations during walking
- PMID: 39739770
- PMCID: PMC11687818
- DOI: 10.1371/journal.pone.0315414
Balance recovery schemes following mediolateral gyroscopic moment perturbations during walking
Abstract
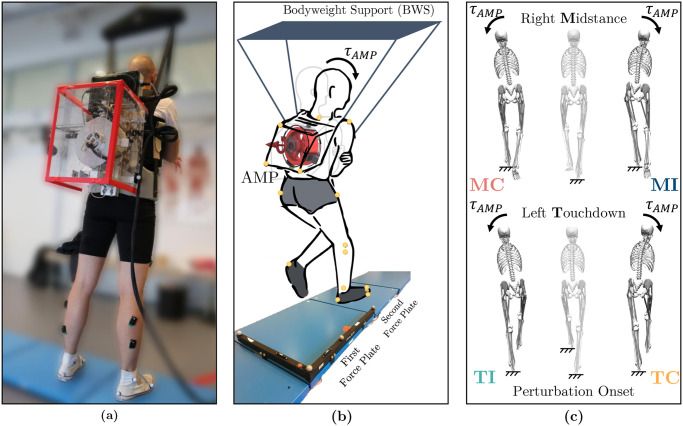
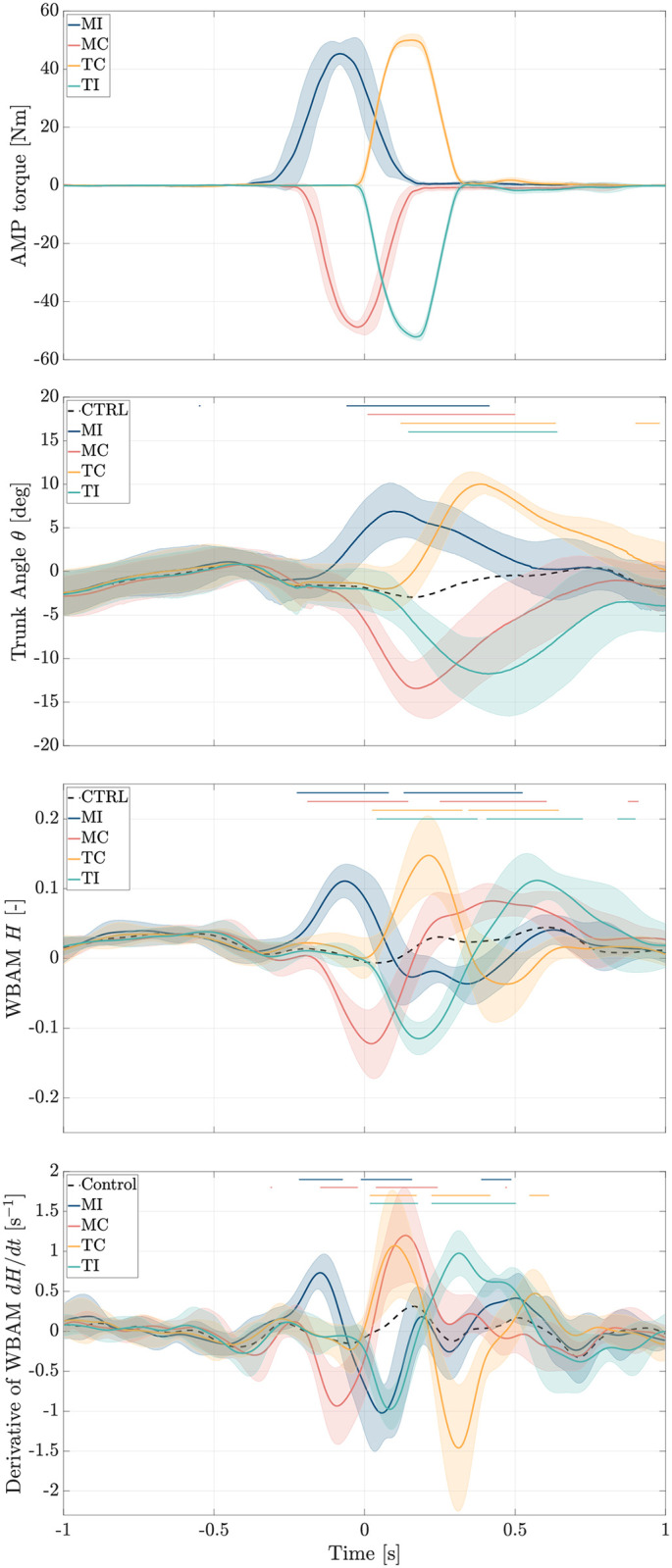
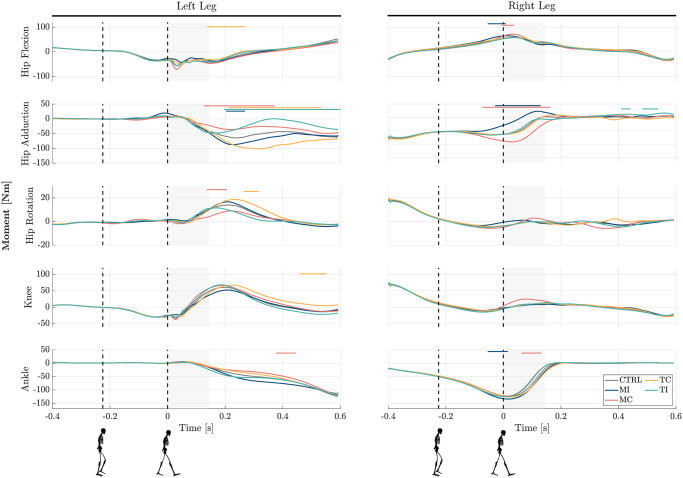
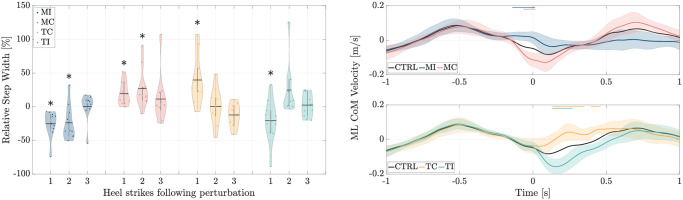
Maintaining balance during human walking hinges on the exquisite orchestration of whole-body angular momentum (WBAM). This study delves into the regulation of WBAM during gait by examining balance strategies in response to upper-body moment perturbations in the frontal plane. A portable Angular Momentum Perturbator (AMP) was utilized in this work, capable of generating perturbation torques on the upper body while minimizing the impact on the center of mass (CoM) excursions. Ten participants underwent upper-body perturbations during either the mid-stance or touch-down moment in both ipsilateral and contralateral directions in the frontal plane. Our findings emphasize the predominant role of the hip strategy and foot placement as primary mechanisms for recovering from WBAM perturbations, regardless of the perturbation's timing or direction. Specifically, hip add/abduction torque and step width were significantly modulated following perturbations during the stance and swing phases, respectively, to reject frontal-plane balance threats. The knee and ankle torque modulation were not found to be effective in the recovery process. Additionally, we observed that recovery from WBAM perturbations occurs promptly within the same stride in which the perturbation occurs, unlike other perturbation scenarios, such as platform translation. These insights have the potential to enhance the development of assistive devices and more robust controllers for bipedal robots.
Copyright: © 2024 Mohseni et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Kajita S, Kanehiro F, Kaneko K, Fujiwara K, Harada K, Yokoi K, et al. Resolved momentum control: Humanoid motion planning based on the linear and angular momentum. In: Proceedings 2003 ieee/rsj international conference on intelligent robots and systems (iros 2003)(cat. no. 03ch37453). vol. 2. IEEE; 2003. p. 1644–1650.
-
- Lee SH, Goswami A. A momentum-based balance controller for humanoid robots on non-level and non-stationary ground. Autonomous Robots. 2012;33:399–414. doi: 10.1007/s10514-012-9294-z - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
