

Role and modulation of various spinal pathways for human upper limb control in different gravity conditions
- PMID: 39761279
- PMCID: PMC11737853
- DOI: 10.1371/journal.pcbi.1012069
Role and modulation of various spinal pathways for human upper limb control in different gravity conditions
Abstract
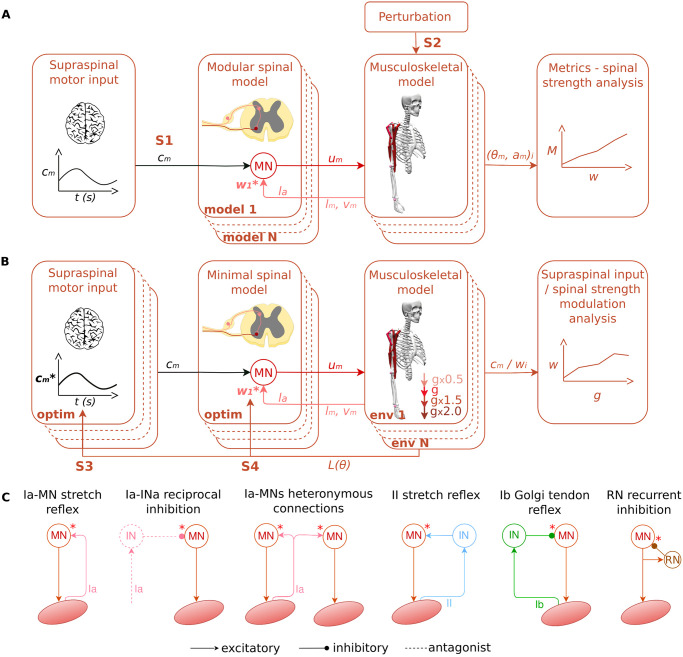
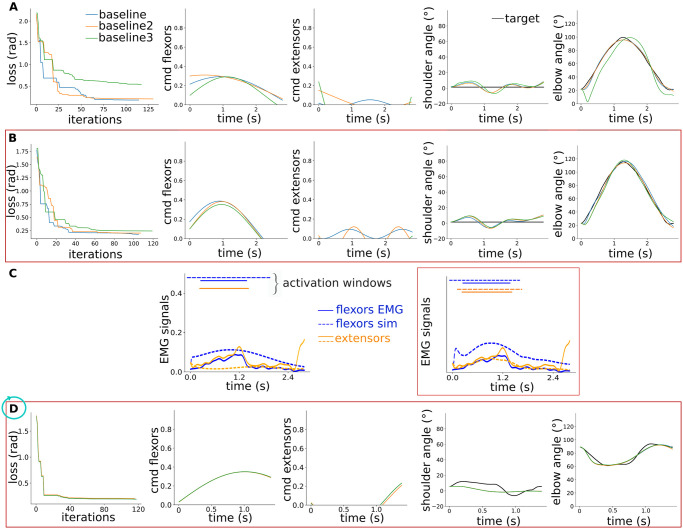
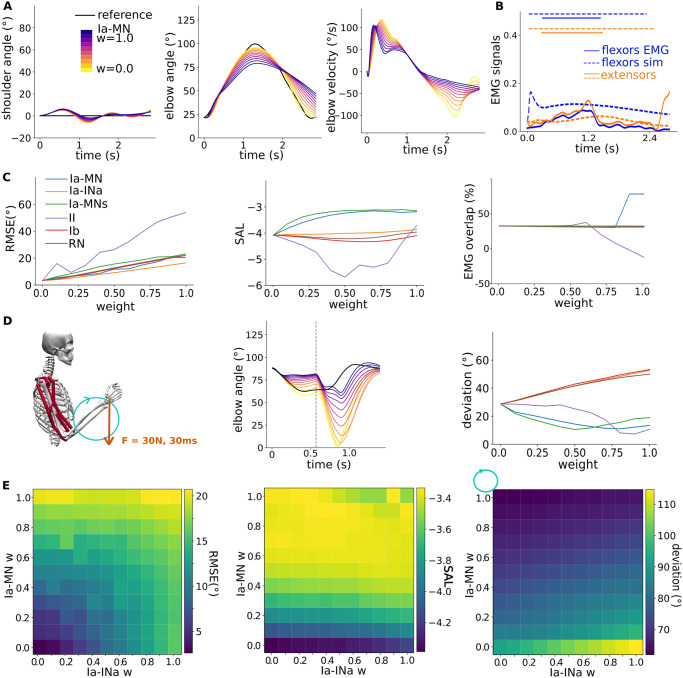
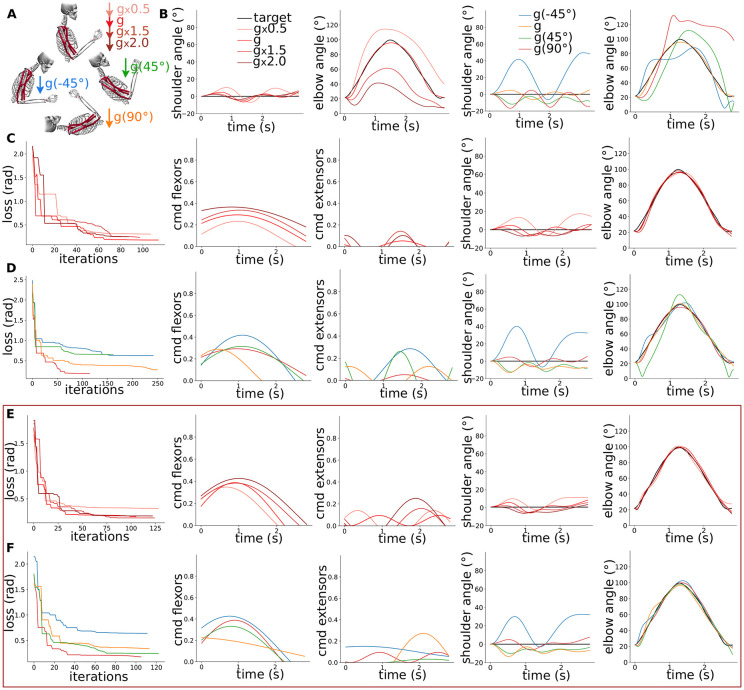
Humans can perform movements in various physical environments and positions (corresponding to different experienced gravity), requiring the interaction of the musculoskeletal system, the neural system and the external environment. The neural system is itself comprised of several interactive components, from the brain mainly conducting motor planning, to the spinal cord (SC) implementing its own motor control centres through sensory reflexes. Nevertheless, it remains unclear whether similar movements in various environmental dynamics necessitate adapting modulation at the brain level, correcting modulation at the spinal level, or both. Here, we addressed this question by focusing on upper limb motor control in various gravity conditions (magnitudes and directions) and using neuromusculoskeletal simulation tools. We integrated supraspinal sinusoidal commands with a modular SC model controlling a musculoskeletal model to reproduce various recorded arm trajectories (kinematics and EMGs) in different contexts. We first studied the role of various spinal pathways (such as stretch reflexes) in movement smoothness and robustness against perturbation. Then, we optimised the supraspinal sinusoidal commands without and with a fixed SC model including stretch reflexes to reproduce a target trajectory in various gravity conditions. Inversely, we fixed the supraspinal commands and optimised the spinal synaptic strengths in the different environments. In the first optimisation context, the presence of SC resulted in easier optimisation of the supraspinal commands (faster convergence, better performance). The main supraspinal commands modulation was found in the flexor sinusoid's amplitude, resp. frequency, to adapt to different gravity magnitudes, resp. directions. In the second optimisation context, the modulation of the spinal synaptic strengths also remarkably reproduced the target trajectory for the mild gravity changes. We highlighted that both strategies of modulation of the supraspinal commands or spinal stretch pathways can be used to control movements in different gravity environments. Our results thus support that the SC can assist gravity compensation.
Copyright: © 2025 Bruel et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Ebbesen CL, Brecht M. Motor cortex—to act or not to act? Nature Reviews Neuroscience. 2017;18(11):694–705. - PubMed
-
- Brown TG. The intrinsic factors in the act of progression in the mammal. Proceedings of the Royal Society of London Series B, containing papers of a biological character. 1911;84(572):308–319. doi: 10.1098/rspb.1911.0077 - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
