

Review on Portable-Powered Lower Limb Exoskeletons
- PMID: 39771825
- PMCID: PMC11679449
- DOI: 10.3390/s24248090
Review on Portable-Powered Lower Limb Exoskeletons
Abstract
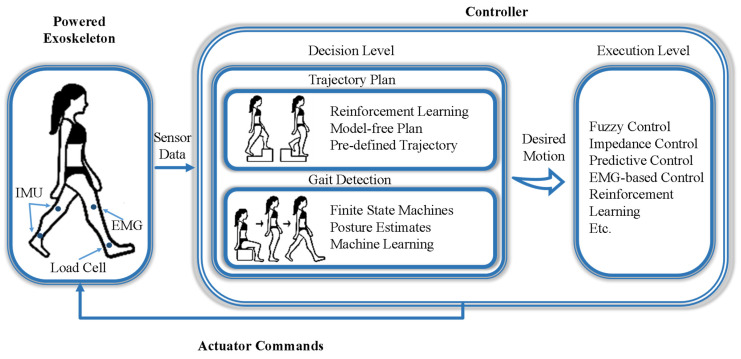
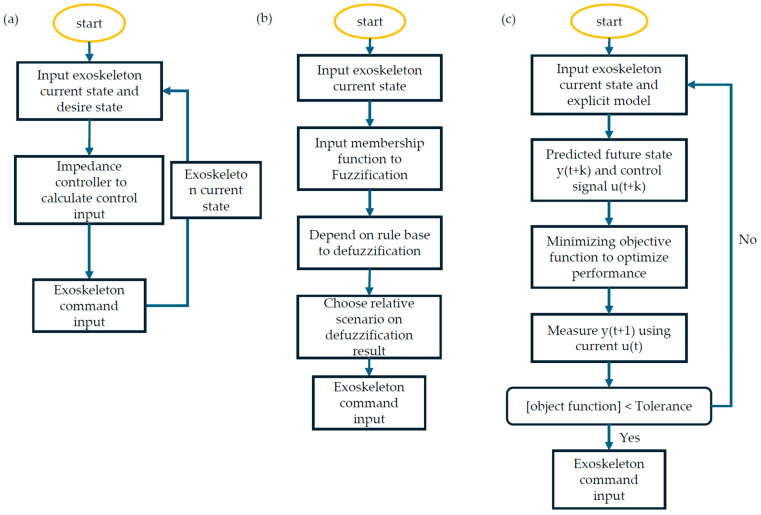
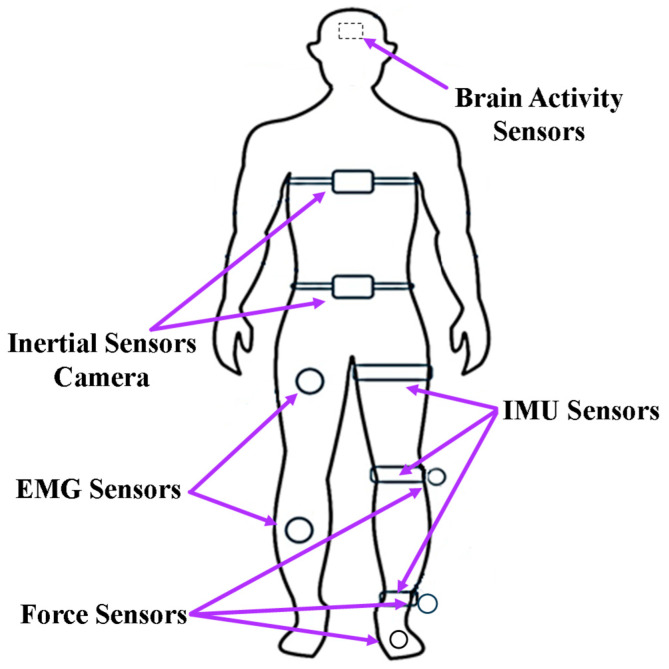
Advancements in science and technology have driven the growing use of robots in daily life, with Portable-Powered Lower Limb Exoskeletons (PPLLEs) emerging as a key innovation. The selection of mechanisms, control strategies, and sensors directly influences the overall performance of the exoskeletons, making it a crucial consideration for research and development. This review examines the current state of PPLLE research, focusing on the aspects of mechanisms, control strategies, and sensors. We discuss the current research status of various technologies, their technological compatibility, and respective benefits comprehensively. Key findings highlight effective designs and strategies, as well as future challenges and opportunities. Finally, we summarize the overall status of PPLLE research and attempt to shed light on the future potential directions of research and development.
Keywords: control strategy; design; fusion; lower limb exoskeleton; sensors.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures
Similar articles
-
Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments.J Neuroeng Rehabil. 2021 Feb 1;18(1):22. doi: 10.1186/s12984-021-00815-5. J Neuroeng Rehabil. 2021. PMID: 33526065 Free PMC article.
-
State of the Art and Future Directions for Lower Limb Robotic Exoskeletons.IEEE Trans Neural Syst Rehabil Eng. 2017 Feb;25(2):171-182. doi: 10.1109/TNSRE.2016.2521160. Epub 2016 Jan 27. IEEE Trans Neural Syst Rehabil Eng. 2017. PMID: 26829794
-
Actuators and transmission mechanisms in rehabilitation lower limb exoskeletons: a review.Biomed Tech (Berl). 2024 Jan 31;69(4):327-345. doi: 10.1515/bmt-2022-0262. Print 2024 Aug 27. Biomed Tech (Berl). 2024. PMID: 38295350 Review.
-
Development and Validation of a Modular Sensor-Based System for Gait Analysis and Control in Lower-Limb Exoskeletons.Sensors (Basel). 2025 Apr 9;25(8):2379. doi: 10.3390/s25082379. Sensors (Basel). 2025. PMID: 40285072 Free PMC article.
-
Passive and Active Exoskeleton Solutions: Sensors, Actuators, Applications, and Recent Trends.Sensors (Basel). 2024 Nov 4;24(21):7095. doi: 10.3390/s24217095. Sensors (Basel). 2024. PMID: 39517992 Free PMC article. Review.
References
-
- Guizzo E., Goldstein H. The rise of the body bots [robotic exoskeletons] IEEE Spectr. 2005;42:50–56. doi: 10.1109/MSPEC.2005.1515961. - DOI
-
- Kazerooni H., Steger R. The Berkeley Lower Extremity Exoskeleton. J. Dyn. Syst. Meas. Control. 2006;128:14–25. doi: 10.1115/1.2168164. - DOI
-
- Strausser K.A., Kazerooni H. The development and testing of a human machine interface for a mobile medical exoskeleton; Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems; San Francisco, CA, USA. 25–30 September 2011; - DOI
-
- Sanz-Merodio D., Cestari M., Arevalo J.C., Carrillo X.A., Garcia E. Generation and control of adaptive gaits in lower-limb exoskeletons for motion assistance. Adv. Robot. 2014;28:329–338. doi: 10.1080/01691864.2013.867284. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
