

Lightweight multidimensional feature enhancement algorithm LPS-YOLO for UAV remote sensing target detection
- PMID: 39779765
- PMCID: PMC11711649
- DOI: 10.1038/s41598-025-85488-z
Lightweight multidimensional feature enhancement algorithm LPS-YOLO for UAV remote sensing target detection
Abstract
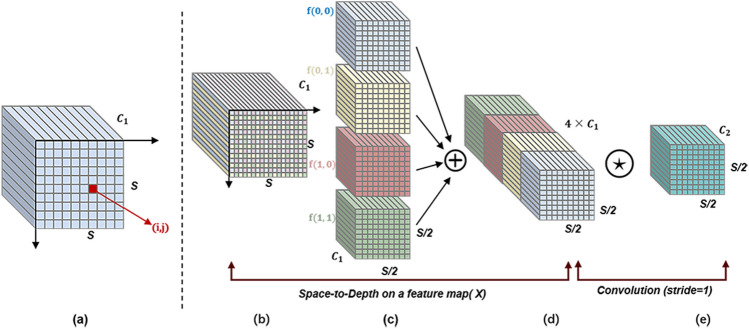
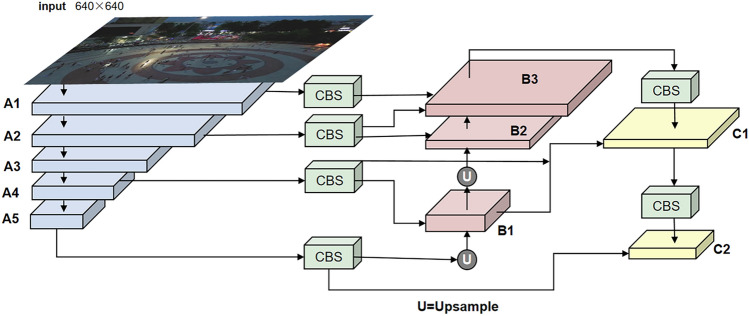
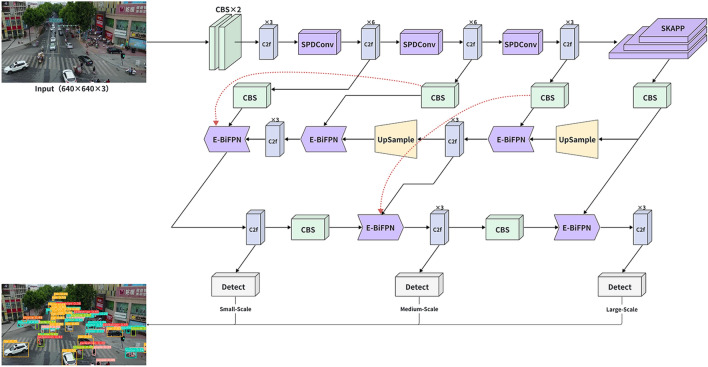
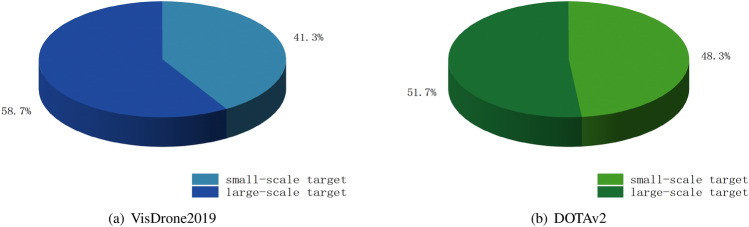
Detecting small targets in UAV remote sensing images is challenging for traditional lightweight methods due to difficulty in feature extraction and high background interference. We propose LPS-YOLO, which improves small target feature extraction while reducing computational complexity by replacing the Conv backbone with SPDConv to retain fine-grained features. LPS-YOLO introduces the SKAPP module for better feature fusion and incorporates the E-BiFPN and OFTP structures to efficiently preserve and transfer backbone information. Evaluation of the VisDrone2019 dataset shows a 17.3% increase in mean Average Precision (mAP) and a 42.5% reduction in parameters compared to the baseline. Additional experiments on the DOTAv2 dataset demonstrate the model's robustness, with a 14.5% improvement in F1 score and a 14.9% increase in mAP over YOLOv8-n. LPS-YOLO offers an effective solution for multi-target detection in UAVs.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures





References
-
- Wu, X., Li, W., Hong, D., Tao, R. & Du, Q. Deep learning for unmanned aerial vehicle-based object detection and tracking: A survey. IEEE Geosci. Remote Sens. Mag.10, 91–124 (2021). - DOI
-
- Watts, A. C., Ambrosia, V. G. & Hinkley, E. A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens.4, 1671–1692 (2012). - DOI
-
- Colomina, I. & Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote. Sens.92, 79–97 (2014). - DOI
-
- Gupta, L., Jain, R. & Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor.18, 1123–1152 (2015). - DOI
-
- Bok, P.-B. & Tuchelmann, Y. Context-aware QoS control for wireless mesh networks of UAVs. In 2011 Proceedings of 20th International Conference on Computer Communications and Networks (ICCCN), 1–6 (IEEE, 2011).
Grants and funding
LinkOut - more resources
Full Text Sources
