

Amplitude and frequency of human gait synchronization with a machine oscillator system
- PMID: 39794442
- PMCID: PMC11723955
- DOI: 10.1038/s41598-025-85202-z
Amplitude and frequency of human gait synchronization with a machine oscillator system
Abstract
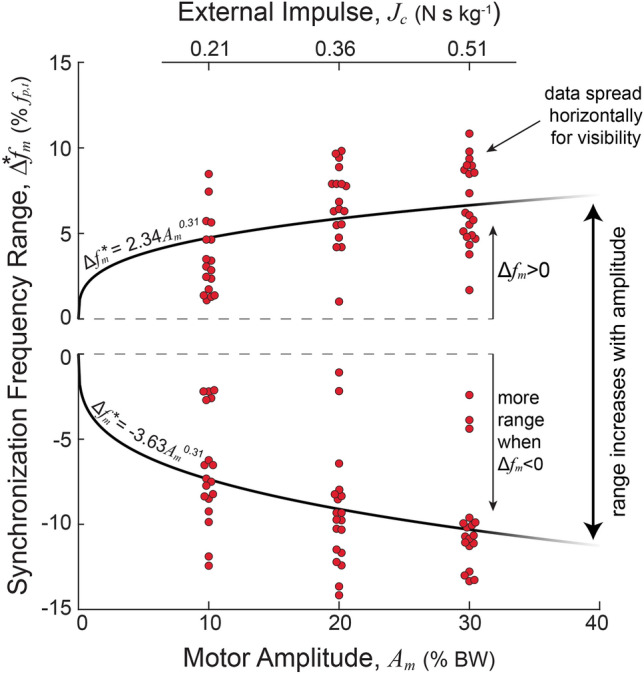
Humans sometimes synchronize their steps to mechanical oscillations in the environment (e.g., when walking on a swaying bridge or with a wearable robot). Previous studies have discovered discrete frequencies and/or amplitudes where individuals spontaneously synchronize to external oscillations, but these parameters are often chosen arbitrarily or for convenience of a successful experiment and are sparsely sampled due to time constraints on subject availability. As a result, the parameter space under which human gait synchronization occurs is still relatively underexplored. Here we systematically measure synchronization over a broad range of parameters in machine oscillations, applied vertically near the body center of mass during walking. Two complementary experiments were utilized to characterize the amplitudes and frequencies where subjects' gait matched the oscillation frequency within ± 0.02 Hz for at least 80% of 20 consecutive steps (i.e., synchronization). Individuals were found to synchronize at lower amplitudes and in less time when the oscillation frequency was nearer their baseline step frequency, as well as over a broader range of frequencies during larger oscillation amplitudes. Subjects also had a greater tendency to synchronize with oscillation frequencies below (rather than above) their baseline step frequencies. The results of this study provide a comprehensive mapping of parameters where synchronization occurs and could inform the design of exoskeletons, rehabilitation devices and other gait-assistive technologies.
Keywords: Amplitude; Entrainment; Frequency; Locomotion; Oscillator; Walking.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures






References
-
- Crowe, A., Schiereck, P., de Boer, R. W. & Keessen, W. Characterization of human gait by means of body center of mass oscillations derived from ground reaction forces. IEEE Trans. Biomed. Eng.42, 293–303 (1995). - PubMed
-
- Strogatz, S. H. & Stewart, I. Coupled oscillators and biological synchronization. Sci. Am.269, 102–109 (1993). - PubMed
-
- Dallard, P. et al. London Millennium Bridge: Pedestrian-induced lateral vibration. J. Bridg. Eng.6, 1–6 (2012).
-
- Strogatz, S. H., Abrams, D. M., McRobie, A., Eckhardt, B. & Ott, E. Crowd synchrony on the Millennium Bridge. Nature438, 43–44 (2005). - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
