

Numerical and experimental methods for the assessment of a human finger-inspired soft pneumatic actuator for gripping applications
- PMID: 39811617
- PMCID: PMC11731513
- DOI: 10.1016/j.mex.2024.103111
Numerical and experimental methods for the assessment of a human finger-inspired soft pneumatic actuator for gripping applications
Abstract
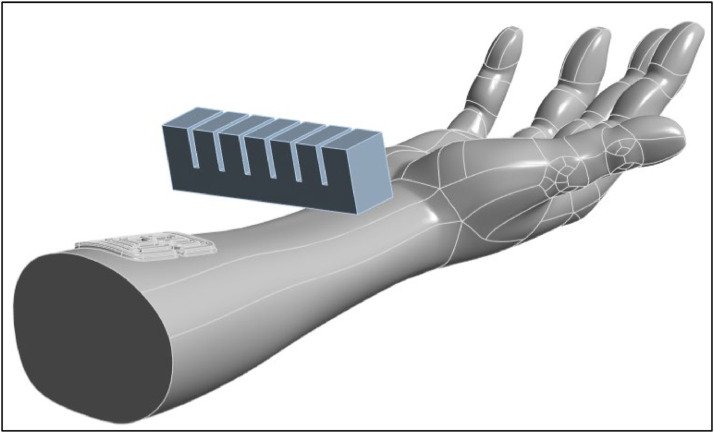
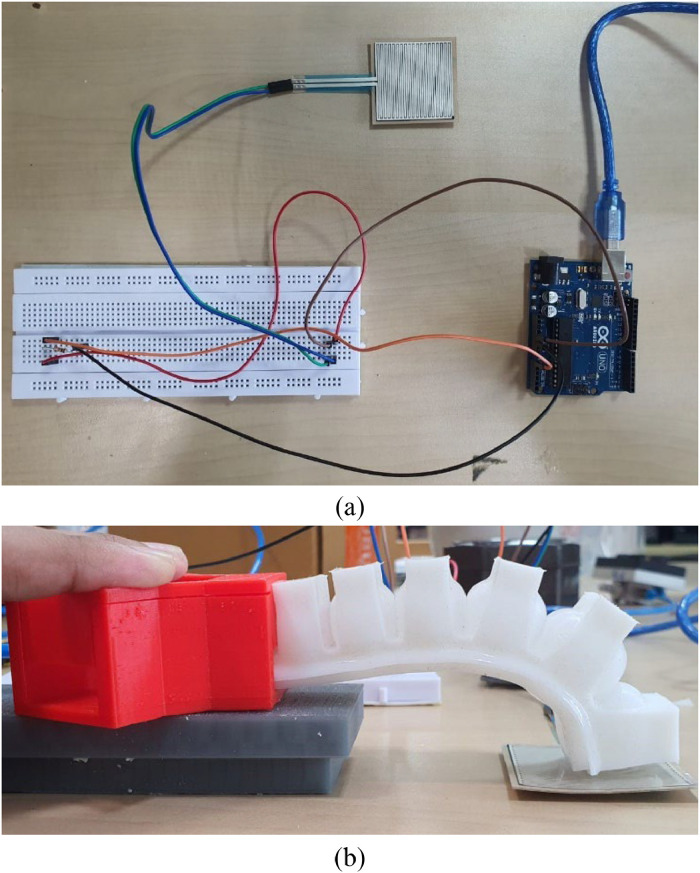
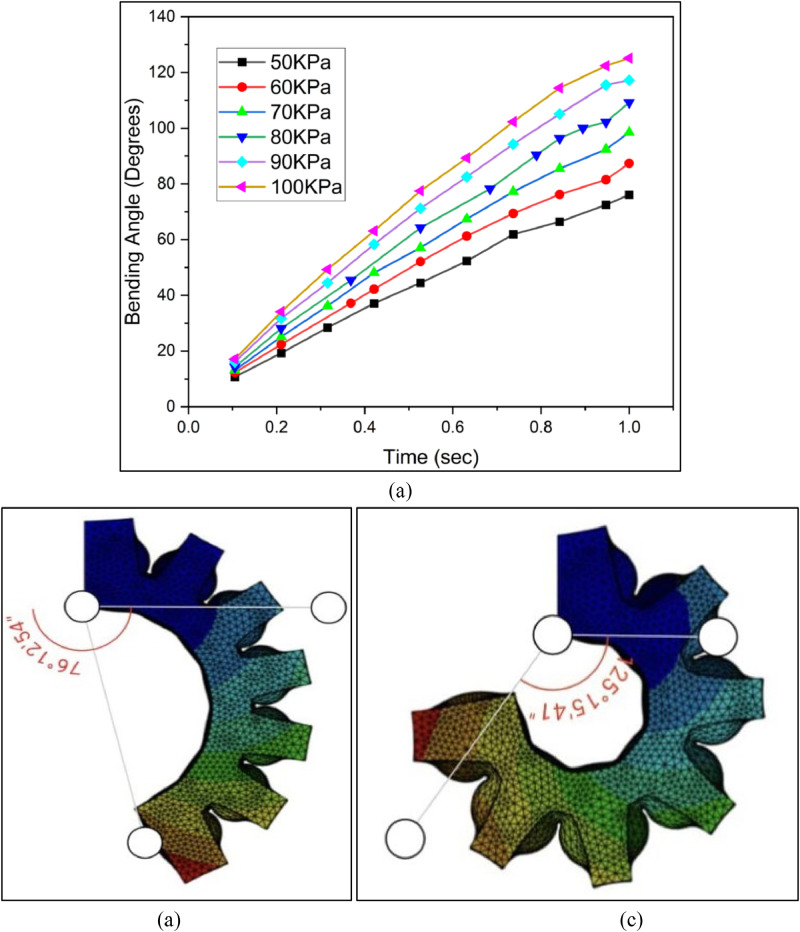
The increasing demand for soft robotic systems in agricultural, biomedical and other applications has driven the development of actuators that can mimic the flexibility and adaptability of human muscles. Several studies have explored the design and implementation of soft actuators for robotic applications, however, there is a need for soft actuators demonstrating delicate gripping capabilities but also excel in specific biomedical applications, such as therapeutic massaging. The objective of this work is to develop a multi-finger soft pneumatic actuator mimicking human fingers for Ayurvedic therapeutic massaging and gripping applications. The actuator is geometrically modeled to mimic the dexterity and flexibility of a human finger and its mechanical behavior such as bending angle and gripping force under air pressure is studied through finite element analysis (FEA). The simulation results are experimentally validated. The finger-based actuator is fabricated using liquid silicone rubber, and its performance namely, bending deformation and gripping force generated at various pressure is determined and these results are compared with the simulated test cases. The study also provides a detailed analysis of the performance of the actuator, thus providing detailed insights into its applicability in therapeutic purposes.•Human finger inspired actuators are expected to demonstrate the dexterity and flexibility of human hands, which poses challenges in its modeling and analysis.•The load carrying capacity and bending movements of the actuator is assessed using numerical method of Finite Element Analysis.•Simulation results are validated through an experimental method using force sensors and image analysis of the bending movement of the soft actuator.
Keywords: Biomedical; Finite element method; Gripper; Numerical and experimental methods; Pneumatic; Soft actuator; Soft robotics.
© 2024 The Authors.
Conflict of interest statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures














References
-
- Majidi C. Soft-matter engineering for soft robotics. Adv. Mater. Technol. 2019 4.2.
-
- Feinberg A.W. Biological soft robotics. Annu. Rev. Biomed. Eng. 2015:243–265. 17.1. - PubMed
-
- Van der Loos H.F.M., Reinkensmeyer D.J., Guglielmelli E. Rehabilitation and health care robotics. Spring. Handb. Robot. 2016:1685–1728.
-
- Bedaf S., et al. Robotic Assistive Technologies. CRC Press; 2017. Robots supporting care for elderly people; pp. 309–332.
LinkOut - more resources
Full Text Sources
