

A three-dimensional kinematic analysis of bipedal walking in a white-handed gibbon (Hylobates lar) on a horizontal pole and flat surface
- PMID: 39812879
- PMCID: PMC11861135
- DOI: 10.1007/s10329-024-01177-x
A three-dimensional kinematic analysis of bipedal walking in a white-handed gibbon (Hylobates lar) on a horizontal pole and flat surface
Abstract
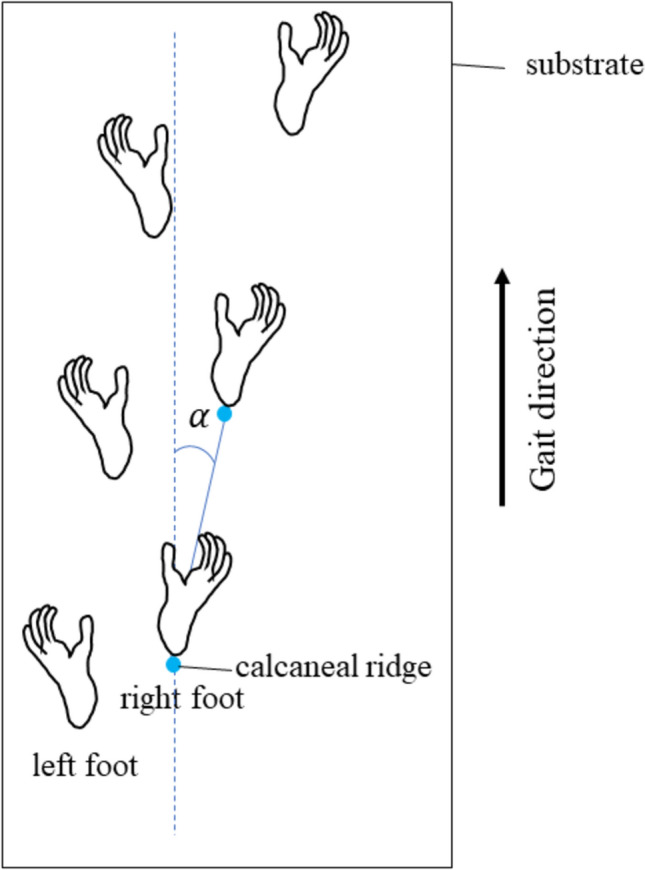
Gibbons, a type of lesser ape, are brachiators but also walk bipedally and without forelimb assistance, not only on the ground but also on tree branches. The arboreal bipedal walking strategy of the gibbons has been studied in previous studies in relation to two-dimensional (2D) kinematic analysis. However, because tree branches and the ground differ greatly in width, leading to a constrained foot contact point on the tree branches, gibbons must adjust their 3D joint motions of trunk and hindlimb on the tree branches. Furthermore, these motor adjustments could help minimize the center of mass (CoM) mediolateral displacement. This study investigated the kinematic adjustment mechanism necessary to enable a gibbon to walk bipedally on an arboreal-like substrate using 3D measurements. Trials were recorded with eight video cameras that were placed around the substrate. The CoM position on the body, the Cardan angles of the hindlimb joints and trunk, and spatiotemporal parameters were calculated. Asymmetry of thorax, pelvis, trunk, and left and right hindlimb joint motion was observed in the pole and flat conditions. In the pole condition, the narrower step width and the smaller range of motion of the mediolateral CoM displacement were observed with increased hip adduction and knee eversion angles. These kinematic adjustments might place the knee and foot directly under the body during the single support phase, producing a reduced step width and the amount of the mediolateral CoM displacement of a gibbon.
Keywords: Bipedal walking; Gibbon; Joint angle; Pole and flat condition; Step width.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Conflict of interest: The authors declare no conflicts of interest.
Figures










Similar articles
-
Locomotor versatility in the white-handed gibbon (Hylobates lar): a spatiotemporal analysis of the bipedal, tripedal, and quadrupedal gaits.J Hum Evol. 2006 May;50(5):552-67. doi: 10.1016/j.jhevol.2005.12.011. Epub 2006 Mar 3. J Hum Evol. 2006. PMID: 16516949
-
Brief communication: Three-dimensional motion analysis of hindlimb during brachiation in a white-handed gibbon (Hylobates lar).Am J Phys Anthropol. 2010 Aug;142(4):650-4. doi: 10.1002/ajpa.21280. Am J Phys Anthropol. 2010. PMID: 20607695
-
Step width and frontal plane trunk motion in bipedal chimpanzee and human walking.J Hum Evol. 2018 Dec;125:27-37. doi: 10.1016/j.jhevol.2018.09.006. Epub 2018 Oct 16. J Hum Evol. 2018. PMID: 30502895
-
Speed modulation in hylobatid bipedalism: a kinematic analysis.J Hum Evol. 2006 Nov;51(5):513-26. doi: 10.1016/j.jhevol.2006.07.005. Epub 2006 Jul 21. J Hum Evol. 2006. PMID: 16959298
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
References
-
- Baldwin LA, Teleki G (1976) Patterns of gibbon behavior on Hall’s Island, Bermuda: a preliminary ethogram for Hylobates lar. In: Rumbaugh D (ed) Gibbon and siamang, vol 4. Karger, Basel, pp 21–105
-
- Carlson KJ, Demes B (2010) Gait dynamics of Cebus apella during quadrupedalism on different substrates. Am J Phys Anthropol 142:273–286. 10.1002/ajpa.21224 - PubMed
-
- Cartmill M (1974) Rethinking primate origins. Science 184:436–443 - PubMed
-
- Cartmill M (1985) Climbing. In: Bramble DM, Liem KF, Wake DB (eds) Functional vertebrate morphology. Belknap Press, Cambridge, pp 73–88
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
