

Versatile graceful degradation framework for bio-inspired proprioception with redundant soft sensors
- PMID: 39835247
- PMCID: PMC11743178
- DOI: 10.3389/frobt.2024.1504651
Versatile graceful degradation framework for bio-inspired proprioception with redundant soft sensors
Abstract
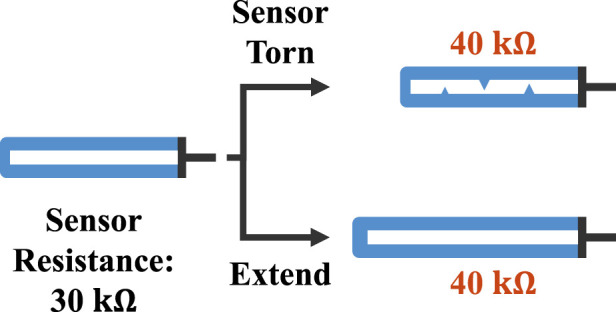
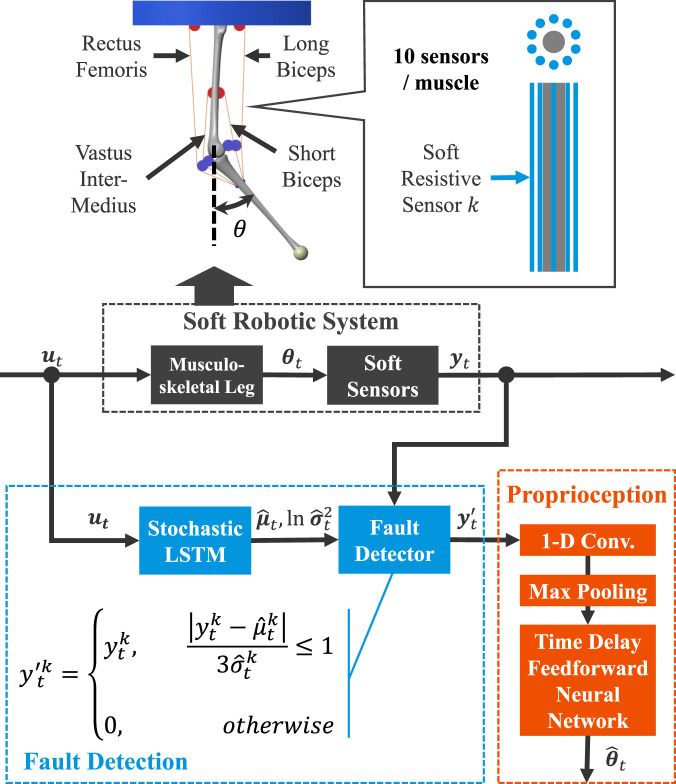
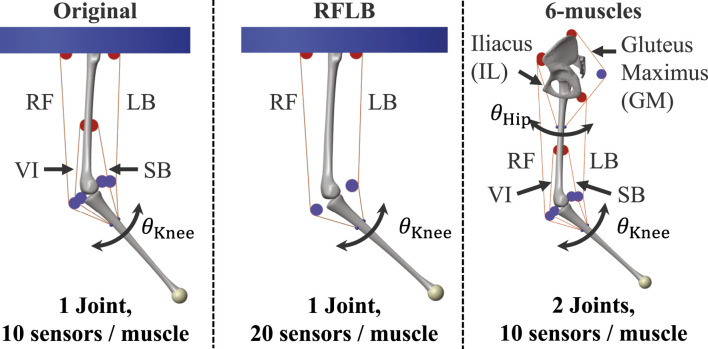
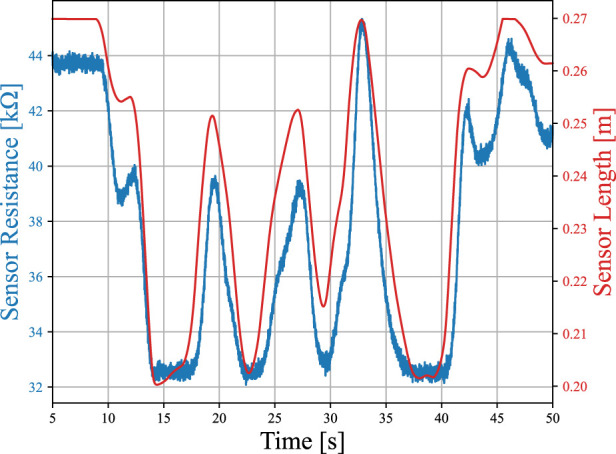
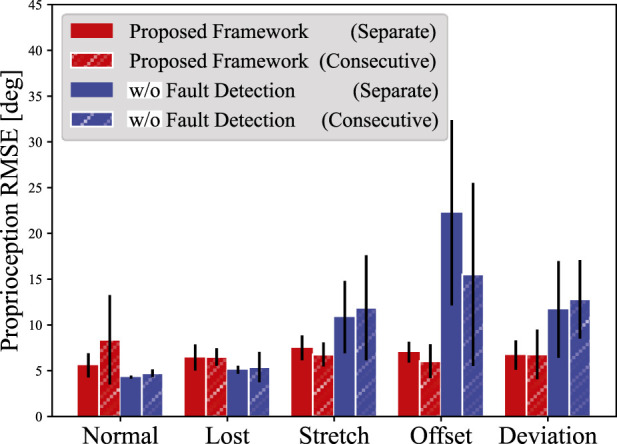
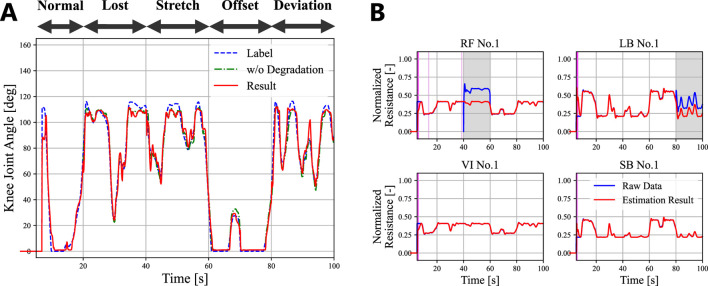
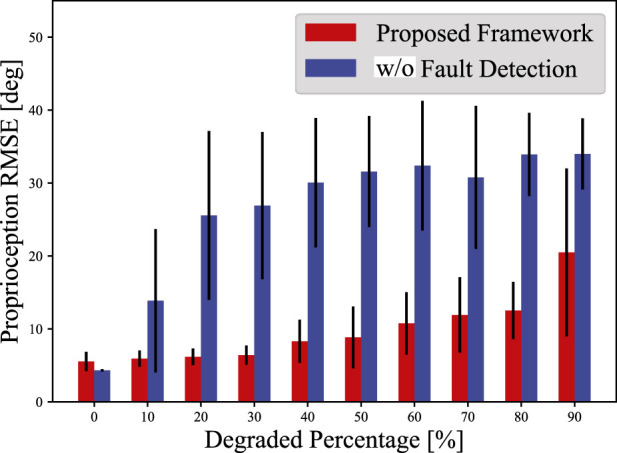
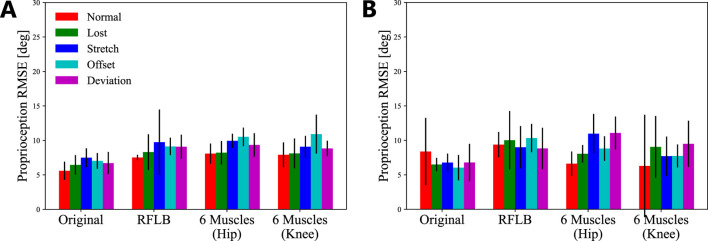
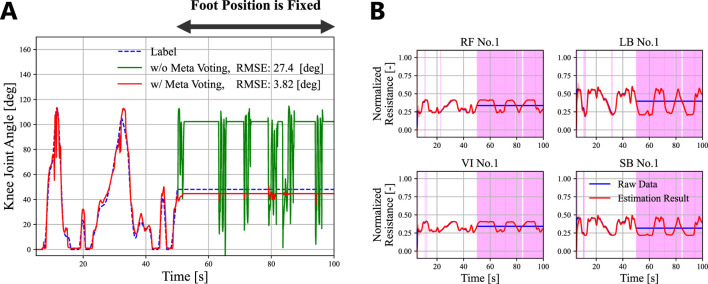
Reliable proprioception and feedback from soft sensors are crucial for enabling soft robots to function intelligently in real-world environments. Nevertheless, soft sensors are fragile and are susceptible to various damage sources in such environments. Some researchers have utilized redundant configuration, where healthy sensors compensate instantaneously for lost ones to maintain proprioception accuracy. However, achieving consistently reliable proprioception under diverse sensor degradation remains a challenge. This paper proposes a novel framework for graceful degradation in redundant soft sensor systems, incorporating a stochastic Long Short-Term Memory (LSTM) and a Time-Delay Feedforward Neural Network (TDFNN). The LSTM estimates readings from healthy sensors to compare them with actual data. Then, statistically abnormal readings are zeroed out. The TDFNN receives the processed sensor readings to perform proprioception. Simulation experiments with a musculoskeletal leg that contains 40 nonlinear soft sensors demonstrate the effectiveness of the proposed framework. Results show that the knee angle proprioception accuracy is retained across four distinct degradation scenarios. Notably, the mean proprioception error increases by less than 1.91°(1.36%) when of the sensors are degraded. These results suggest that the proposed framework enhances the reliability of soft sensor proprioception, thereby improving the robustness of soft robots in real-world applications.
Keywords: graceful degradation; neural network; proprioception; redundant sensors; self-adaptation; soft sensors and actuators.
Copyright © 2025 Sugiyama, Kutsuzawa, Owaki, Almanzor, Iida and Hayashibe.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest. The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Figures
Similar articles
-
Soft Robot Proprioception Using Unified Soft Body Encoding and Recurrent Neural Network.Soft Robot. 2023 Aug;10(4):825-837. doi: 10.1089/soro.2021.0056. Epub 2023 Mar 31. Soft Robot. 2023. PMID: 37001175
-
Robust Multimodal Indirect Sensing for Soft Robots Via Neural Network-Aided Filter-Based Estimation.Soft Robot. 2022 Jun;9(3):591-612. doi: 10.1089/soro.2020.0024. Epub 2021 Jun 25. Soft Robot. 2022. PMID: 34171965
-
Soft Robots' Dynamic Posture Perception Using Kirigami-Inspired Flexible Sensors with Porous Structures and Long Short-Term Memory (LSTM) Neural Networks.Sensors (Basel). 2022 Oct 11;22(20):7705. doi: 10.3390/s22207705. Sensors (Basel). 2022. PMID: 36298057 Free PMC article.
-
Anisotropy in magnetic materials for sensors and actuators in soft robotic systems.Nanoscale. 2024 Apr 4;16(14):6778-6819. doi: 10.1039/d3nr05737b. Nanoscale. 2024. PMID: 38502047 Review.
-
Soft touchless sensors and touchless sensing for soft robots.Front Robot AI. 2024 Jan 18;11:1224216. doi: 10.3389/frobt.2024.1224216. eCollection 2024. Front Robot AI. 2024. PMID: 38312746 Free PMC article. Review.
References
-
- Akiba T., Sano S., Yanase T., Ohta T., Koyama M. (2019). Optuna: a next-generation hyperparameter optimization framework, , 2623, 2631. 10.1145/3292500.3330701 - DOI
-
- Alatorre D., Axinte D., Rabani A. (2022). Continuum robot proprioception: the ionic liquid approach. IEEE Trans. Robotics 38, 526–535. 10.1109/TRO.2021.3082020 - DOI
-
- Almanzor E., Ye F., Shi J., Thuruthel T. G., Wurdemann H. A., Iida F. (2023). Static shape control of soft continuum robots using deep visual inverse kinematic models. IEEE Trans. Robotics 39, 2973–2988. 10.1109/TRO.2023.3275375 - DOI
-
- Amjadi M., Kyung K.-U., Park I., Sitti M. (2016). Stretchable, skin-mountable, and wearable strain sensors and their potential applications: a review. Adv. Funct. Mater. 26, 1678–1698. 10.1002/adfm.201504755 - DOI
LinkOut - more resources
Full Text Sources