

Reliable and robust robotic handling of microplates via computer vision and touch feedback
- PMID: 39845568
- PMCID: PMC11752899
- DOI: 10.3389/frobt.2024.1462717
Reliable and robust robotic handling of microplates via computer vision and touch feedback
Abstract
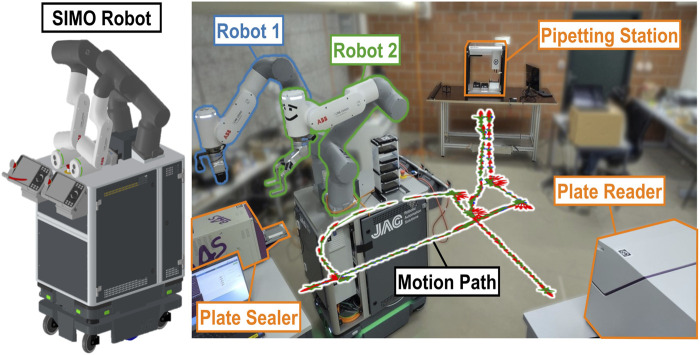
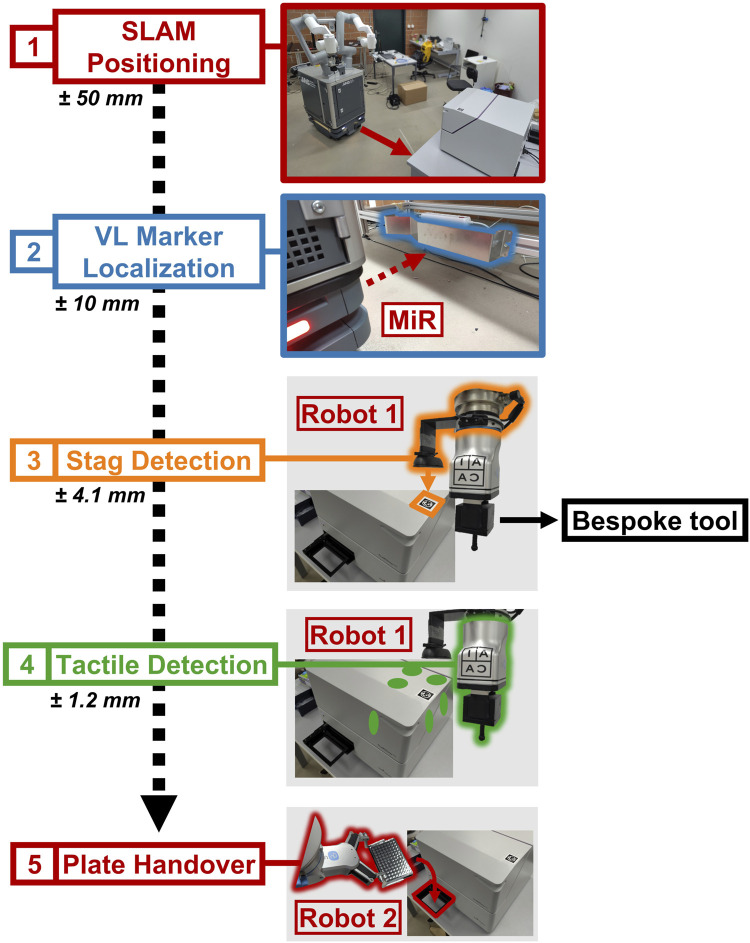
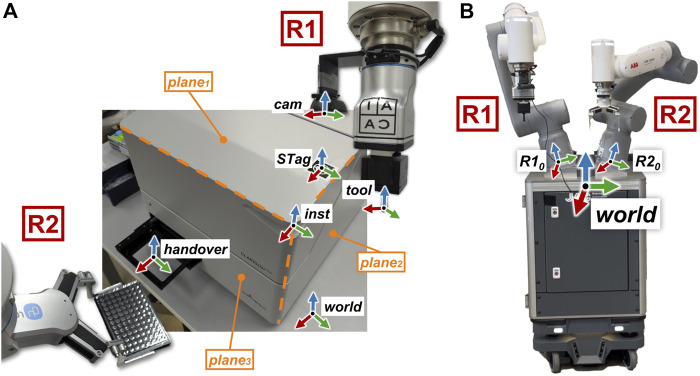
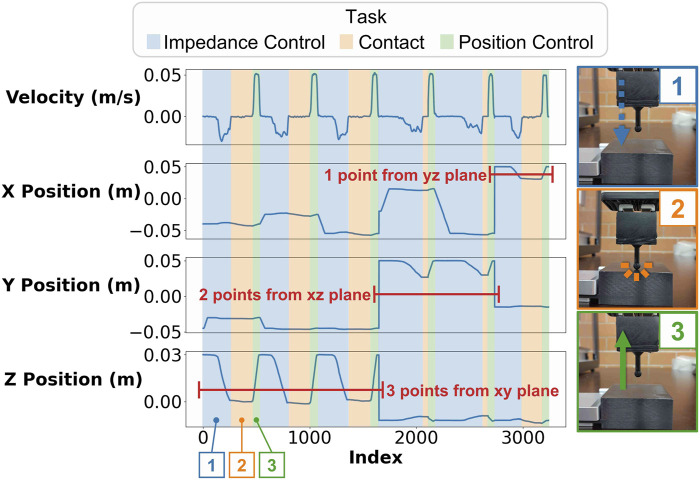
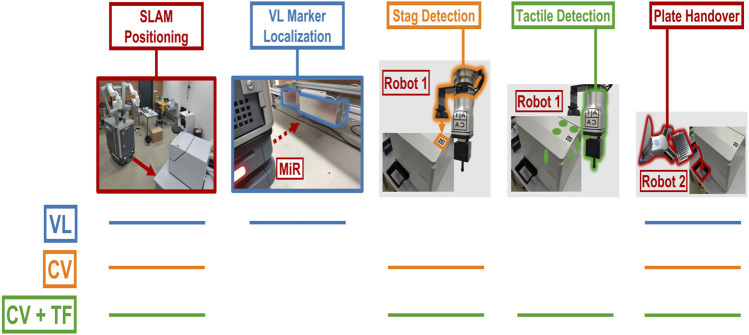
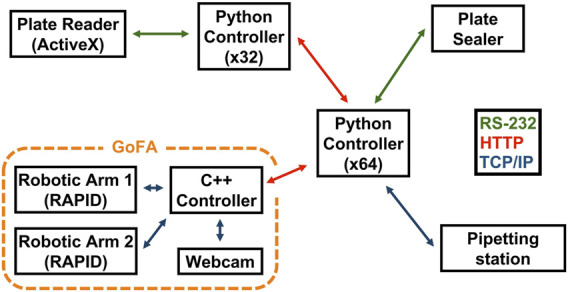
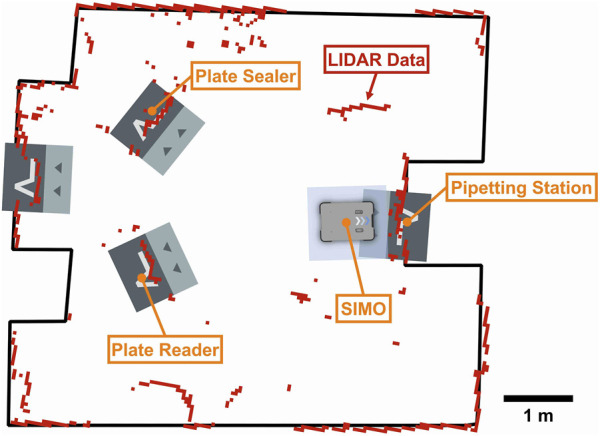
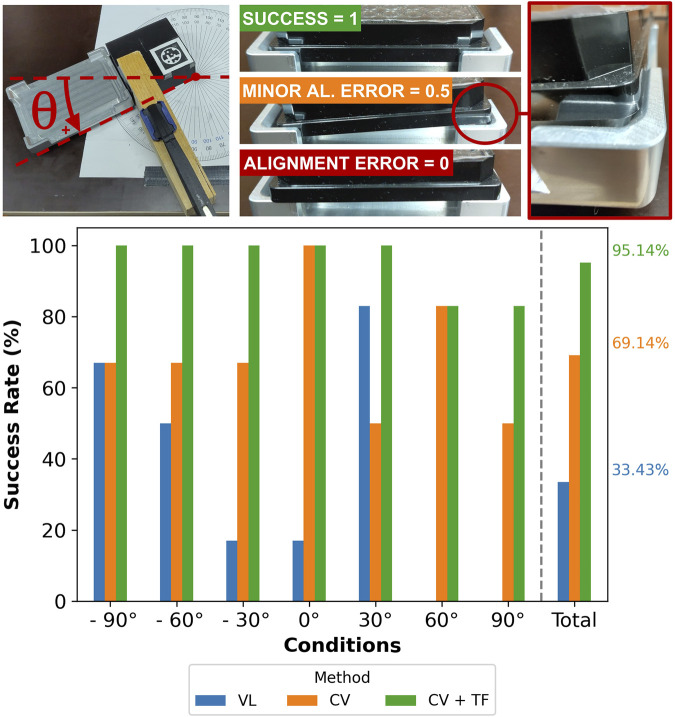
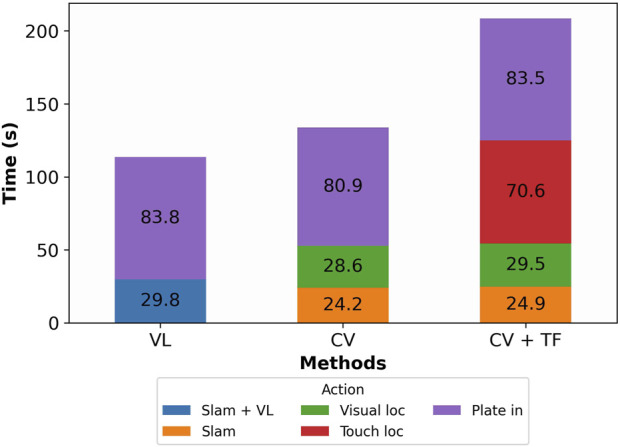
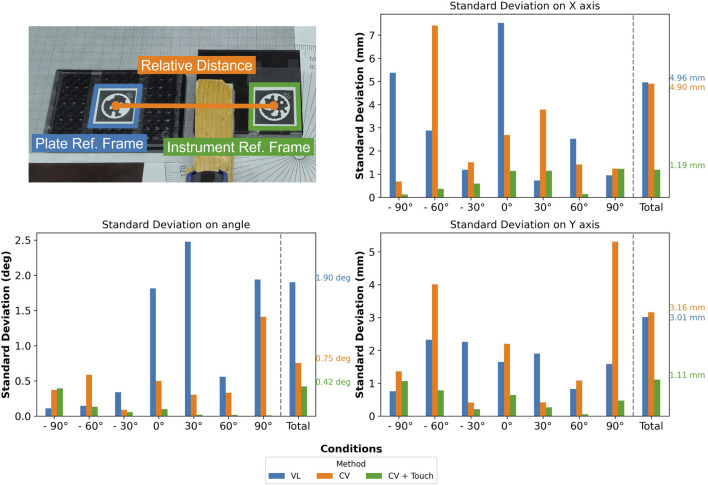
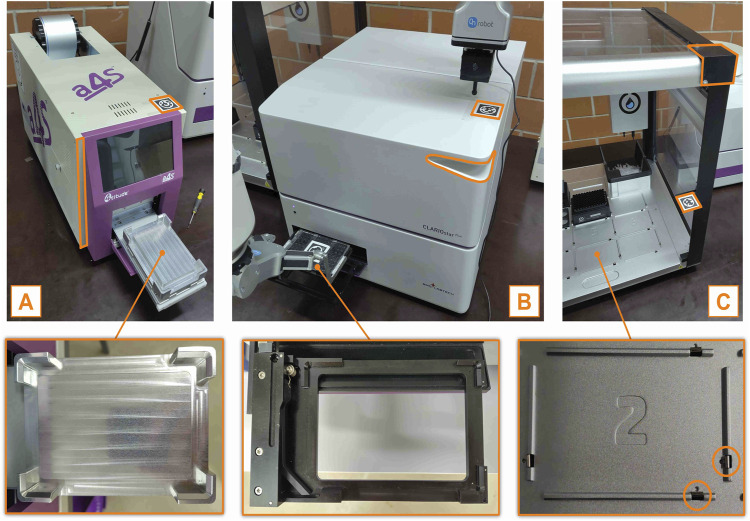
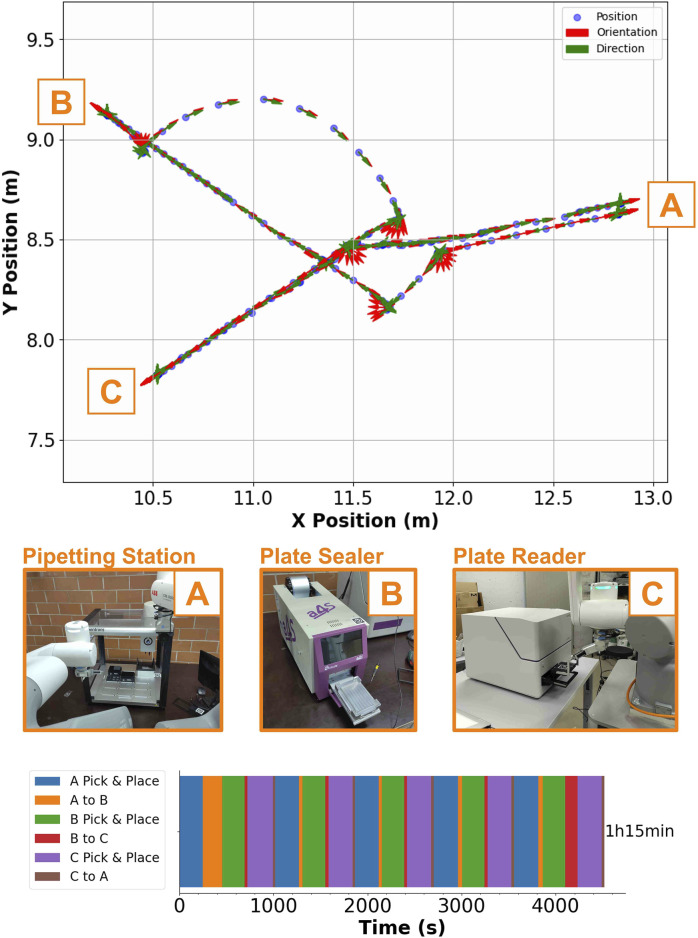
Laboratory automation requires reliable and precise handling of microplates, but existing robotic systems often struggle to achieve this, particularly when navigating around the dynamic and variable nature of laboratory environments. This work introduces a novel method integrating simultaneous localization and mapping (SLAM), computer vision, and tactile feedback for the precise and autonomous placement of microplates. Implemented on a bi-manual mobile robot, the method achieves fine-positioning accuracies of 1.2 mm and 0.4°. The approach was validated through experiments using both mockup and real laboratory instruments, demonstrating at least a 95% success rate across varied conditions and robust performance in a multi-stage protocol. Compared to existing methods, our framework effectively generalizes to different instruments without compromising efficiency. These findings highlight the potential for enhanced robotic manipulation in laboratory automation, paving the way for more reliable and reproducible experimental workflows.
Keywords: automation; computer vision; life science; mobile robotics; robot manipulation.
Copyright © 2025 Scamarcio, Tan, Stellacci and Hughes.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
Similar articles
-
SLAM algorithm applied to robotics assistance for navigation in unknown environments.J Neuroeng Rehabil. 2010 Feb 17;7:10. doi: 10.1186/1743-0003-7-10. J Neuroeng Rehabil. 2010. PMID: 20163735 Free PMC article.
-
Performance evaluation of 3D vision-based semi-autonomous control method for assistive robotic manipulator.Disabil Rehabil Assist Technol. 2018 Feb;13(2):140-145. doi: 10.1080/17483107.2017.1299804. Epub 2017 Mar 22. Disabil Rehabil Assist Technol. 2018. PMID: 28326859
-
Towards robotic laboratory automation Plug & play: Survey and concept proposal on teaching-free robot integration with the lapp digital twin.SLAS Technol. 2023 Apr;28(2):82-88. doi: 10.1016/j.slast.2023.01.003. Epub 2023 Jan 13. SLAS Technol. 2023. PMID: 36646253
-
Towards robotic laboratory automation Plug & Play: The "LAPP" framework.SLAS Technol. 2022 Feb;27(1):18-25. doi: 10.1016/j.slast.2021.11.003. Epub 2021 Dec 7. SLAS Technol. 2022. PMID: 35058216 Review.
-
A review of computer vision for semi-autonomous control of assistive robotic manipulators (ARMs).Disabil Rehabil Assist Technol. 2020 Oct;15(7):731-745. doi: 10.1080/17483107.2019.1615998. Epub 2019 Jul 3. Disabil Rehabil Assist Technol. 2020. PMID: 31268368 Review.
References
-
- Abolhasani M., Kumacheva E. (2023). The rise of self-driving labs in chemical and materials sciences. Nat. Synth. 2, 483–492. 10.1038/s44160-022-00231-0 - DOI
-
- Ali M. M., Liu H., Stoll N., Thurow K. (2016). “Multiple lab ware manipulation in life science laboratories using mobile robots,” in 2016 17th international conference on mechatronics-mechatronika (ME), (Prague, Czech Republic: IEEE; ), 1–7.
-
- Benligiray B., Topal C., Akinlar C. (2019). Stag: a stable fiducial marker system. Image Vis. Comput. 89, 158–169. 10.1016/j.imavis.2019.06.007 - DOI
LinkOut - more resources
Full Text Sources