

Empirical Data-Driven Linear Model of a Swimming Robot Using the Complex Delay-Embedding DMD Technique
- PMID: 39851776
- PMCID: PMC11761222
- DOI: 10.3390/biomimetics10010060
Empirical Data-Driven Linear Model of a Swimming Robot Using the Complex Delay-Embedding DMD Technique
Abstract
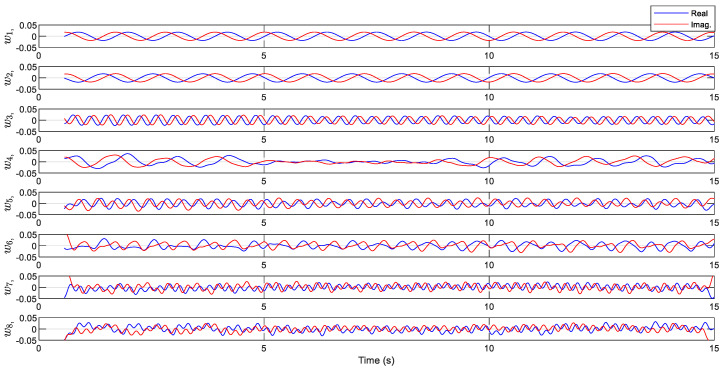
Anguilliform locomotion, an efficient aquatic locomotion mode where the whole body is engaged in fluid-body interaction, contains sophisticated physics. We hypothesized that data-driven modeling techniques may extract models or patterns of the swimmers' dynamics without implicitly measuring the hydrodynamic variables. This work proposes empirical kinematic control and data-driven modeling of a soft swimming robot. The robot comprises six serially connected segments that can individually bend with the segmental pneumatic artificial muscles. Kinematic equations and relations are proposed to measure the desired actuation to mimic anguilliform locomotion kinematics. The robot was tested experimentally and the position and velocities of spatially digitized points were collected using QualiSys® Tracking Manager (QTM) 1.6.0.1. The collected data were analyzed offline, proposing a new complex variable delay-embedding dynamic mode decomposition (CDE DMD) algorithm that combines complex state filtering and time embedding to extract a linear approximate model. While the experimental results exhibited exotic curves in phase plane and time series, the analysis results showed that the proposed algorithm extracts linear and chaotic modes contributing to the data. It is concluded that the robot dynamics can be described by the linearized model interrupted by chaotic modes. The technique successfully extracts coherent modes from limited measurements and linearizes the system dynamics.
Keywords: CDE DMD; bio-inspired locomotion; bio-robotics; data-driven modeling; soft robotics.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures
















References
-
- Vorus W.S., Taravella B.M. Anguilliform fish propulsion of highest hydrodynamic efficiency. J. Mar. Sci. Appl. 2011;10:163–174. doi: 10.1007/s11804-011-1056-3. - DOI
LinkOut - more resources
Full Text Sources
