

Enabling high-throughput quantitative wood anatomy through a dedicated pipeline
- PMID: 39905535
- PMCID: PMC11796111
- DOI: 10.1186/s13007-025-01330-7
Enabling high-throughput quantitative wood anatomy through a dedicated pipeline
Abstract
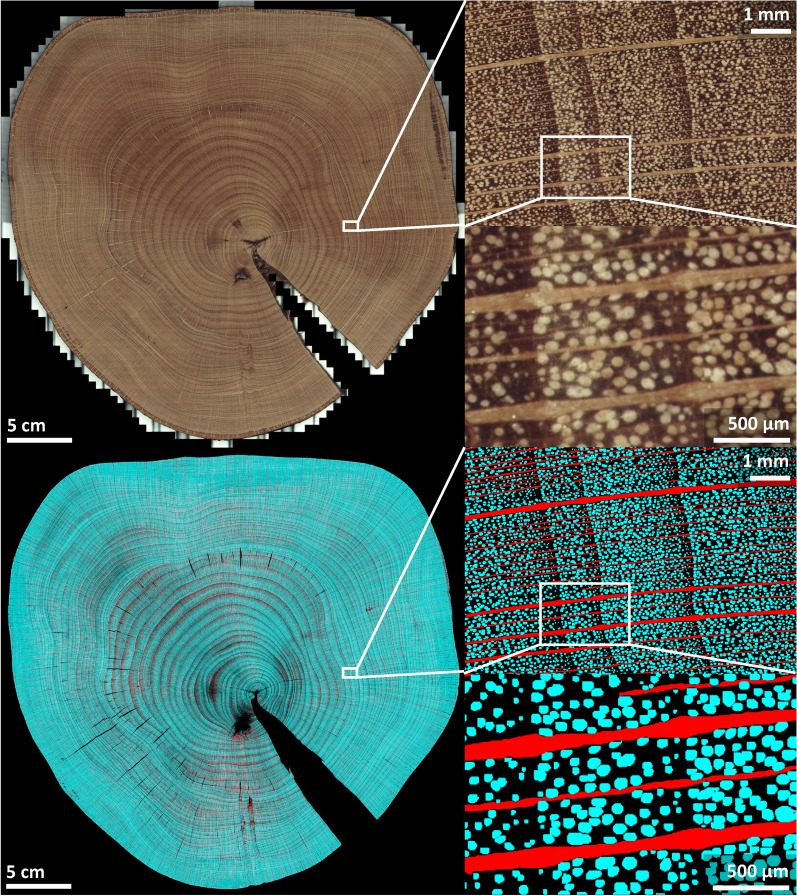
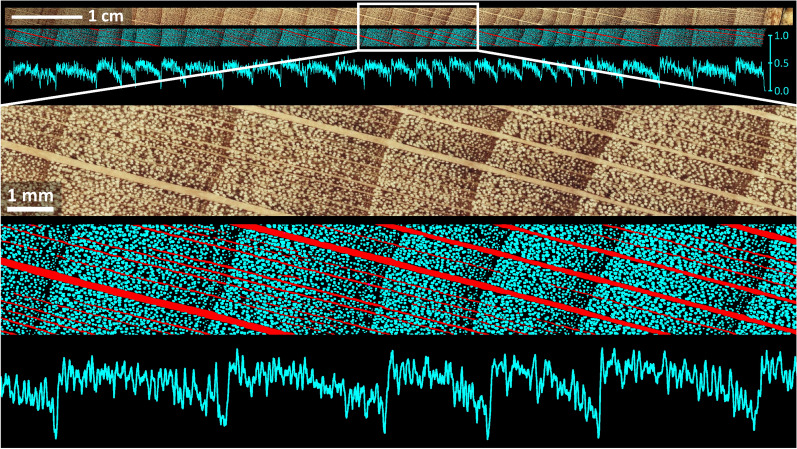
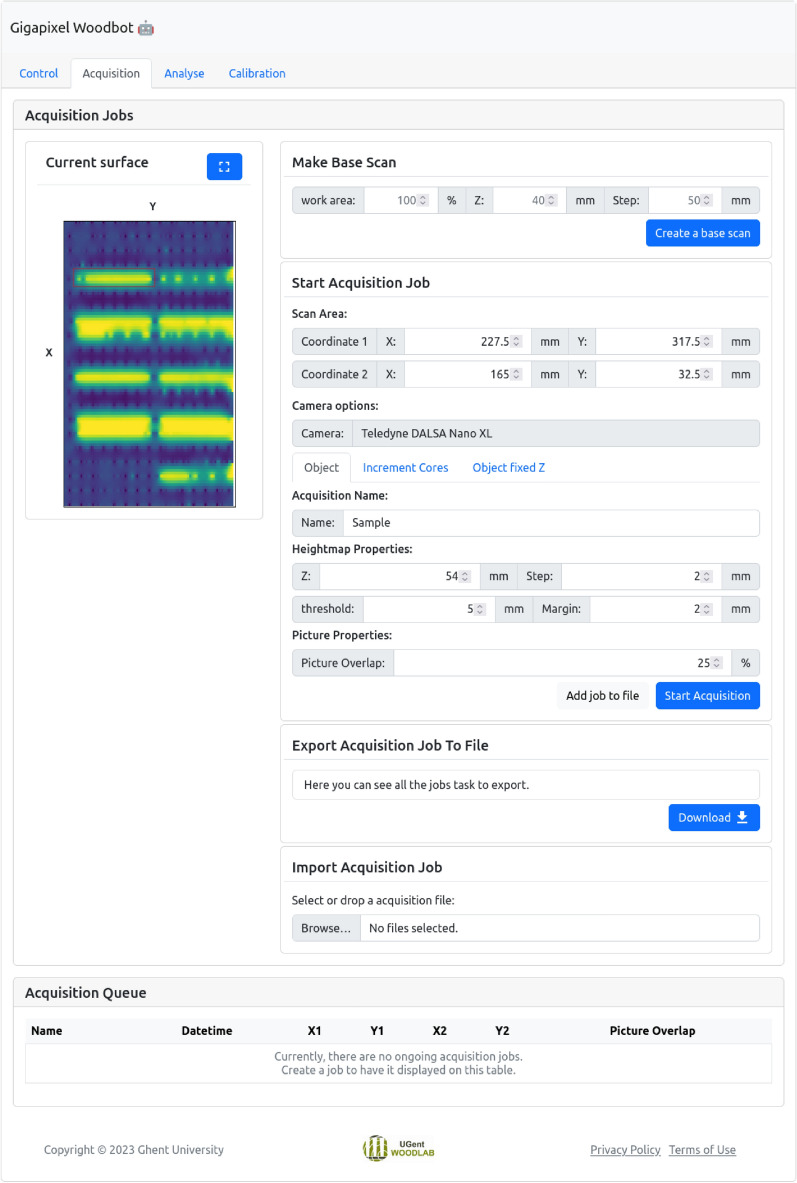
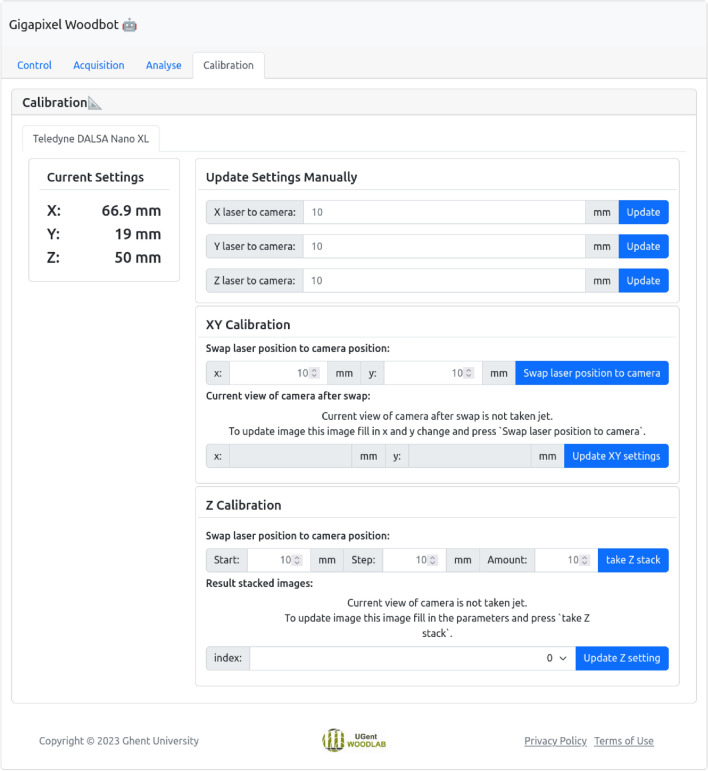
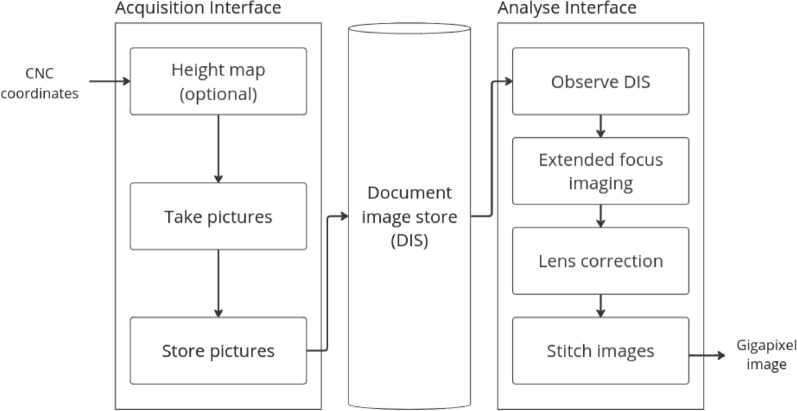
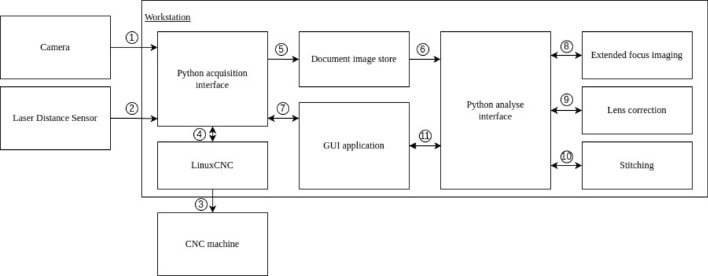
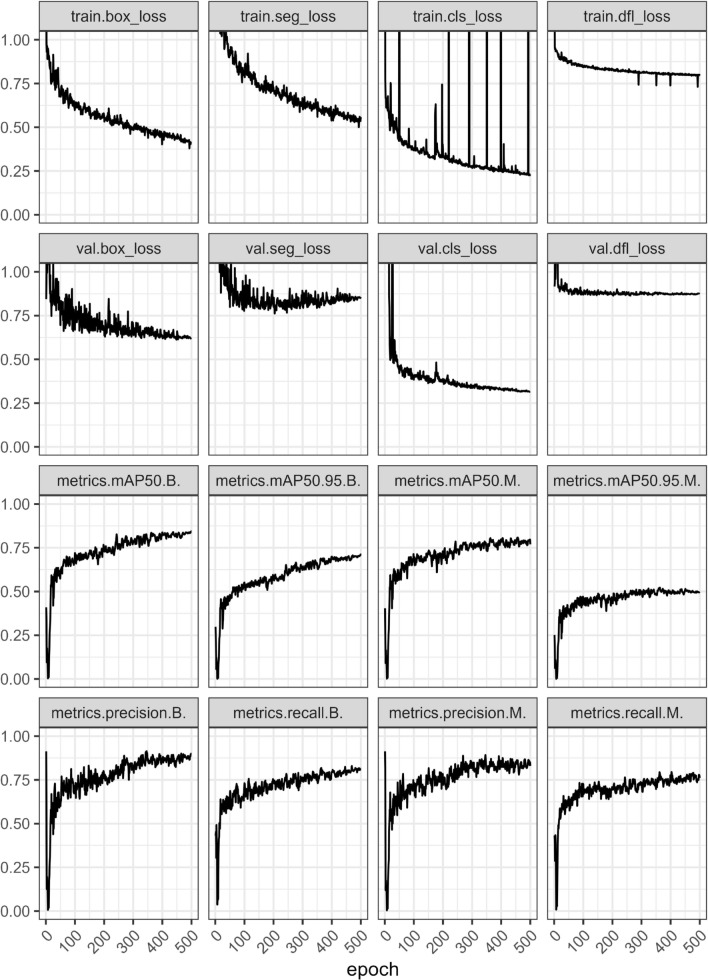
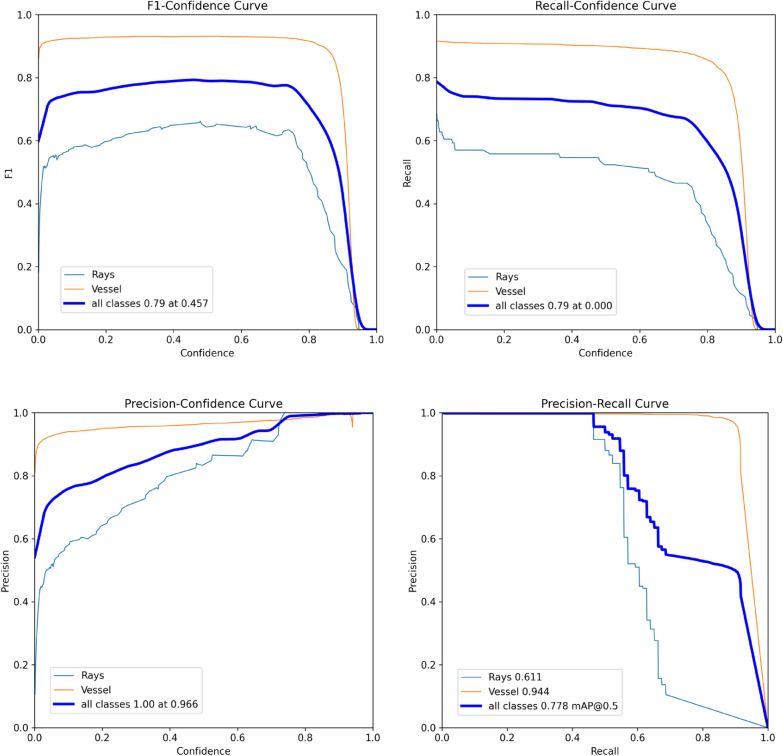
Throughout their lifetime, trees store valuable environmental information within their wood. Unlocking this information requires quantitative analysis, in most cases of the surface of wood. The conventional pathway for high-resolution digitization of wood surfaces and segmentation of wood features requires several manual and time consuming steps. We present a semi-automated high-throughput pipeline for sample preparation, gigapixel imaging, and analysis of the anatomy of the end-grain surfaces of discs and increment cores. The pipeline consists of a collaborative robot (Cobot) with sander for surface preparation, a custom-built open-source robot for gigapixel imaging (Gigapixel Woodbot), and a Python routine for deep-learning analysis of gigapixel images. The robotic sander allows to obtain high-quality surfaces with minimal sanding or polishing artefacts. It is designed for precise and consistent sanding and polishing of wood surfaces, revealing detailed wood anatomical structures by applying consecutively finer grits of sandpaper. Multiple samples can be processed autonomously at once. The custom-built open-source Gigapixel Woodbot is a modular imaging system that enables automated scanning of large wood surfaces. The frame of the robot is a CNC (Computer Numerical Control) machine to position a camera above the objects. Images are taken at different focus points, with a small overlap between consecutive images in the X-Y plane, and merged by mosaic stitching, into a gigapixel image. Multiple scans can be initiated through the graphical application, allowing the system to autonomously image several objects and large surfaces. Finally, a Python routine using a trained YOLOv8 deep learning network allows for fully automated analysis of the gigapixel images, here shown as a proof-of-concept for the quantification of vessels and rays on full disc surfaces and increment cores. We present fully digitized beech discs of 30-35 cm diameter at a resolution of 2.25 m, for which we automatically quantified the number of vessels (up to 13 million) and rays. We showcase the same process for five 30 cm length beech increment cores also digitized at a resolution of 2.25 m, and generated pith-to-bark profiles of vessel density. This pipeline allows researchers to perform high-detail analysis of anatomical features on large surfaces, test fundamental hypotheses in ecophysiology, ecology, dendroclimatology, and many more with sufficient sample replication.
Keywords: Deep learning; Forest ecology; Gigapixel imaging; Image stitching; Increment cores; Quantitative wood anatomy; Robotic sander; Wood discs.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Ethics approval and consent to participate: Not applicable. Consent for publication: Not applicable. Competing interests: The authors declare that they have no competing interests.
Figures






Similar articles
-
Advanced X-ray CT scanning can boost tree ring research for earth system sciences.Ann Bot. 2019 Nov 15;124(5):837-847. doi: 10.1093/aob/mcz126. Ann Bot. 2019. PMID: 31361809 Free PMC article.
-
Tree ring segmentation using UNEt TRansformer neural network on stained microsections for quantitative wood anatomy.Front Plant Sci. 2024 Jan 8;14:1327163. doi: 10.3389/fpls.2023.1327163. eCollection 2023. Front Plant Sci. 2024. PMID: 38259935 Free PMC article.
-
Relationships Between Wood-Anatomical Features and Resistance Drilling Density in Norway Spruce and European Beech.Front Plant Sci. 2022 Apr 8;13:872950. doi: 10.3389/fpls.2022.872950. eCollection 2022. Front Plant Sci. 2022. PMID: 35463439 Free PMC article.
-
Quantitative vessel mapping on increment cores: a critical comparison of image acquisition methods.Front Plant Sci. 2025 Feb 12;16:1502237. doi: 10.3389/fpls.2025.1502237. eCollection 2025. Front Plant Sci. 2025. PMID: 40012731 Free PMC article.
-
A computational pipeline for quantification of pulmonary infections in small animal models using serial PET-CT imaging.EJNMMI Res. 2013 Jul 23;3(1):55. doi: 10.1186/2191-219X-3-55. EJNMMI Res. 2013. PMID: 23879987 Free PMC article.
References
-
- Griffin D, Porter ST, Trumper ML, Carlson KE, Crawford DJ, Schwalen D, et al. Gigapixel macro photography of tree rings. Tree-Ring Res. 2021;77(2):86–94.
-
- Tardif J, Conciatori F. Microscopic examination of wood. In: Yeung E, Stasolla C, Sumner M, Huang B, editors. Sample preparation and techniques for light microscopy. Cham: Springer; 2015. p. 331–44.
-
- Spiecker H, Schinker MG, Hansen J, Park Y, Ebding T, Döll W. Cell structure in tree rings: Novel methods for preparation and image analysis of large cross sections. IAWA Journal. 2000;21(3):361–73. 10.1163/22941932-90000253.
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
