

A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion
- PMID: 39920131
- PMCID: PMC11806074
- DOI: 10.1038/s41467-025-56704-1
A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion
Abstract
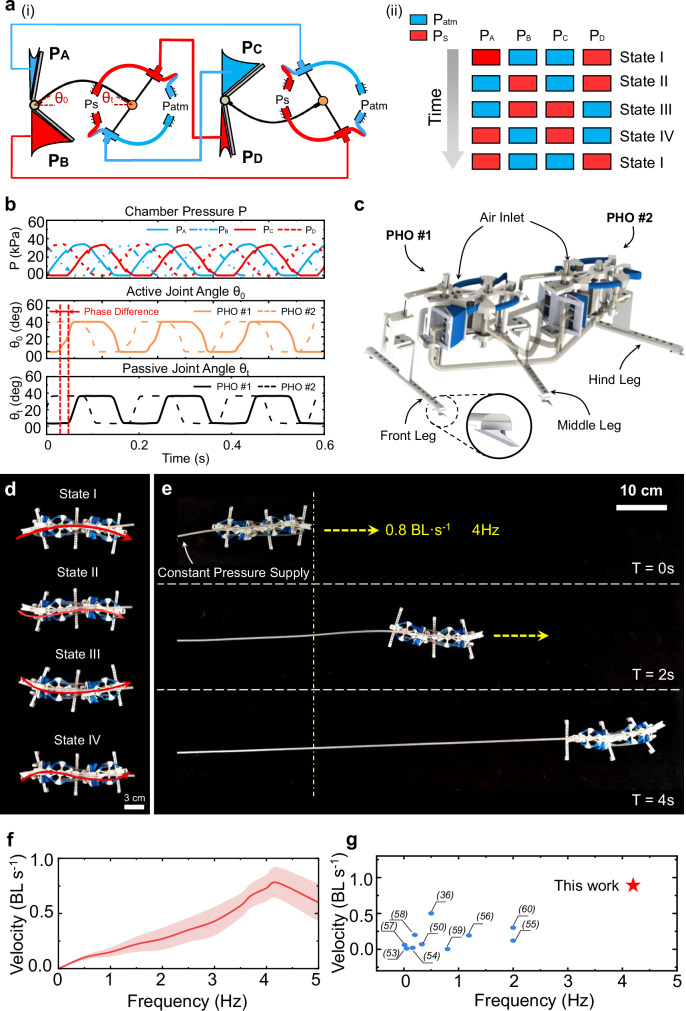
Pneumatic oscillators, incorporating soft non-electrical logic gates, offer an efficient means of actuating robots to perform tasks in extreme environments. However, the current design paradigms for these devices typically feature uniform structures with low rigidity, which restricts their oscillation frequency and limits their functions. Here, we present a pneumatic hybrid oscillator that integrates a snap-through buckling beam, fabric chambers, and a switch valve into its hybrid architecture. This design creates a stiffness gradient through a soft-elastic-rigid coupling mechanism, which substantially boosts the oscillator's frequency and broadens its versatility in robotic applications. Leveraging the characteristic capabilities of the oscillator, three distinct robots are developed, including a bionic jumping robot with high motion speed, a crawling robot with a pre-programmed logic gait, and a swimming robot with adjustable motion patterns. This work provides an effective design paradigm in robotics, enabling autonomous and efficient execution of complex, high-performance tasks, without relying on electronic control systems.
© 2025. The Author(s).
Conflict of interest statement
Competing interests: The authors declare no competing interests.
Figures





Similar articles
-
Electronics-free pneumatic circuits for controlling soft-legged robots.Sci Robot. 2021 Feb 17;6(51):eaay2627. doi: 10.1126/scirobotics.aay2627. Sci Robot. 2021. PMID: 34043527
-
Bioinspired Amphibious Origami Robot with Body Sensing for Multimodal Locomotion.Soft Robot. 2022 Dec;9(6):1198-1209. doi: 10.1089/soro.2021.0118. Epub 2022 Jun 7. Soft Robot. 2022. PMID: 35671518
-
Pneumatic System Capable of Supplying Programmable Pressure States for Soft Robots.Soft Robot. 2022 Oct;9(5):1001-1013. doi: 10.1089/soro.2021.0016. Epub 2021 Dec 16. Soft Robot. 2022. PMID: 34918970
-
Bionic Multi-Legged Robots with Flexible Bodies: Design, Motion, and Control.Biomimetics (Basel). 2024 Oct 15;9(10):628. doi: 10.3390/biomimetics9100628. Biomimetics (Basel). 2024. PMID: 39451834 Free PMC article. Review.
-
Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots.Bioinspir Biomim. 2016 Mar 10;11(2):025001. doi: 10.1088/1748-3190/11/2/025001. Bioinspir Biomim. 2016. PMID: 26963596 Review.
References
-
- Tovée, M. J. & Rolls, E. T. The functional nature of neuronal oscillations. Trends Neurosci.15, 387 (1992). - PubMed
-
- Hess, B. & Boiteux, A. Oscillatory phenomena in biochemistry. Annu. Rev. Biochem.40, 237–258 (1971). - PubMed
-
- Daniel, T. L. & Tu, M. S. Animal movement, mechanical tuning and coupled systems. J. Exp. Biol.202, 3415–3421 (1999). - PubMed
-
- Trzaska, Z. in Mathematical Modelling and Computing in Physics, Chemistry and Biology: Fundamentals and Applications 161–190 (Springer, 2023).
-
- Zhao, Y. et al. Soft phototactic swimmer based on self-sustained hydrogel oscillator. Sci. Robot.4, eaax7112 (2019). - PubMed
LinkOut - more resources
Full Text Sources
