

Movement traits important to conservation and fisheries management: an example with red snapper
- PMID: 39920255
- PMCID: PMC11805965
- DOI: 10.1038/s41598-025-86892-1
Movement traits important to conservation and fisheries management: an example with red snapper
Abstract
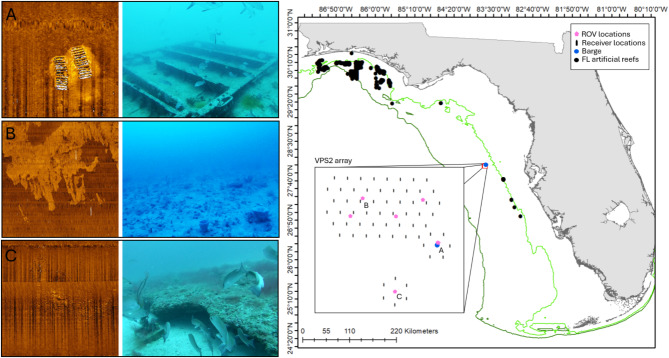
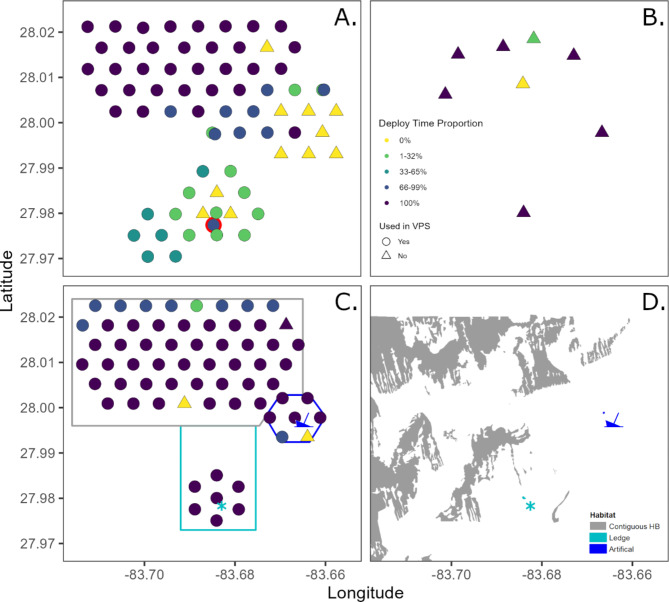
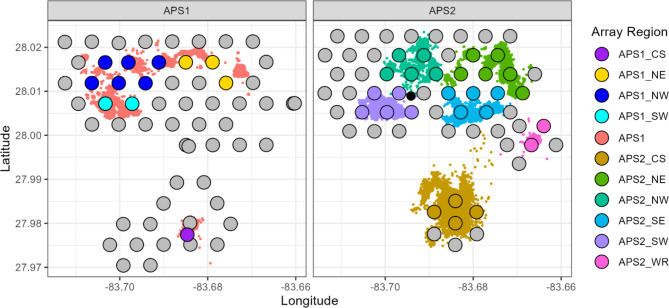
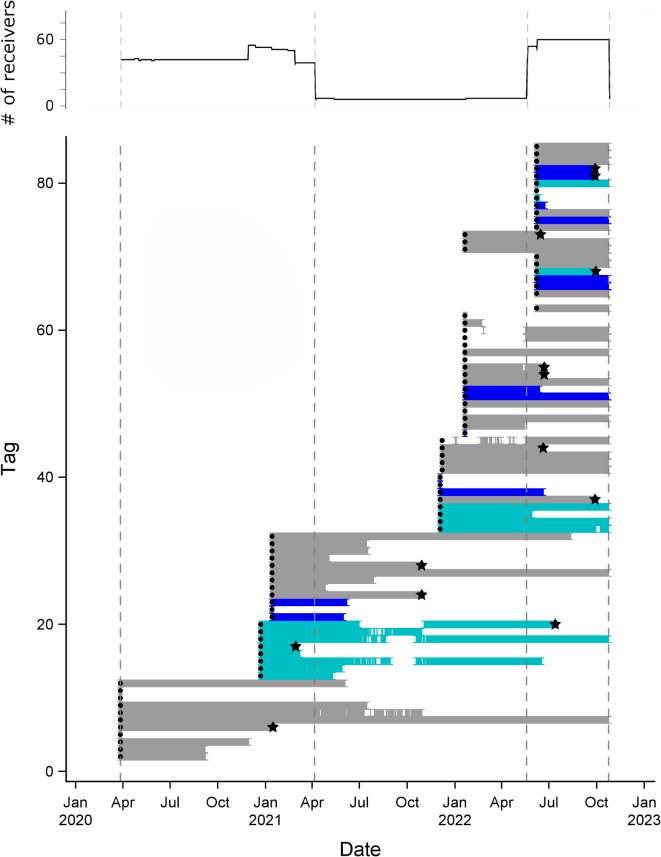
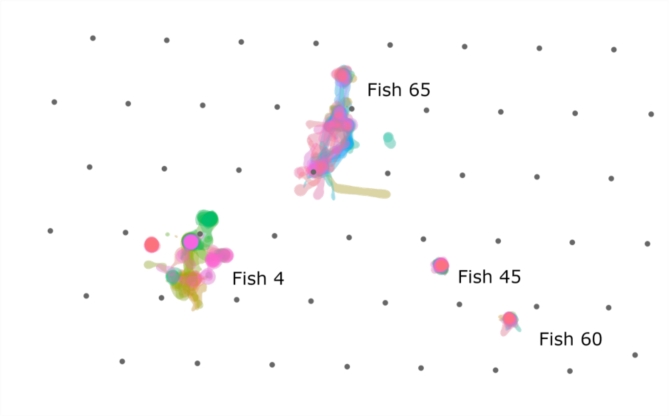
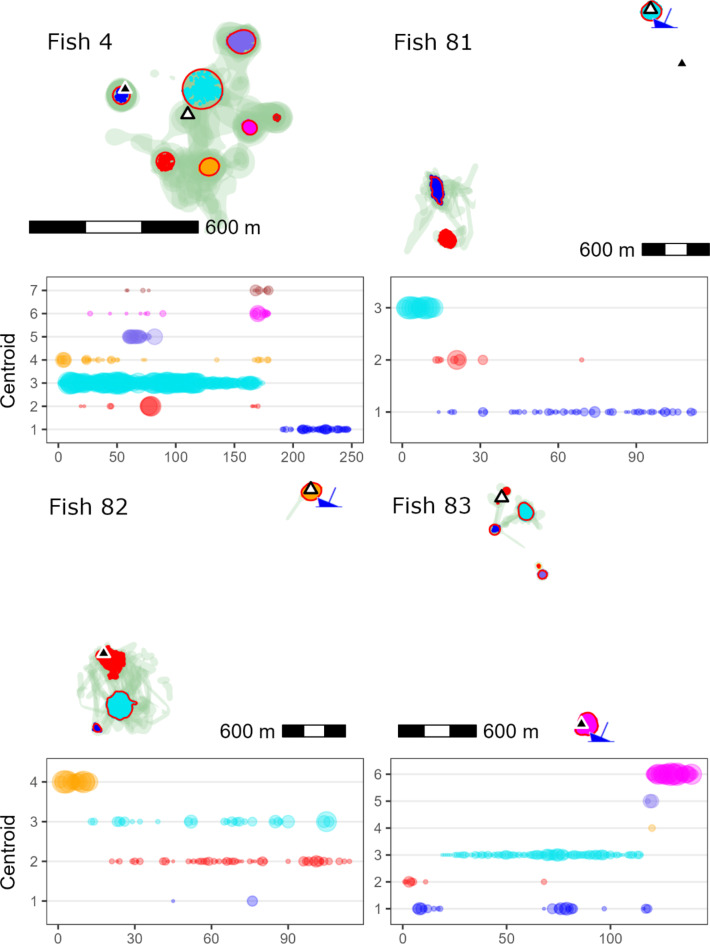
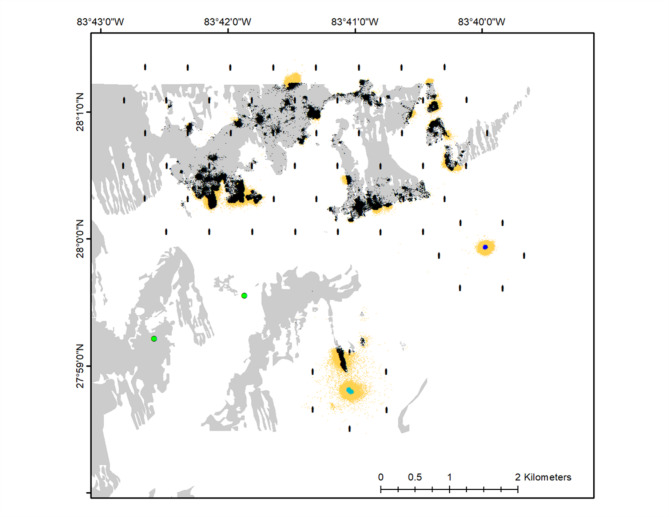
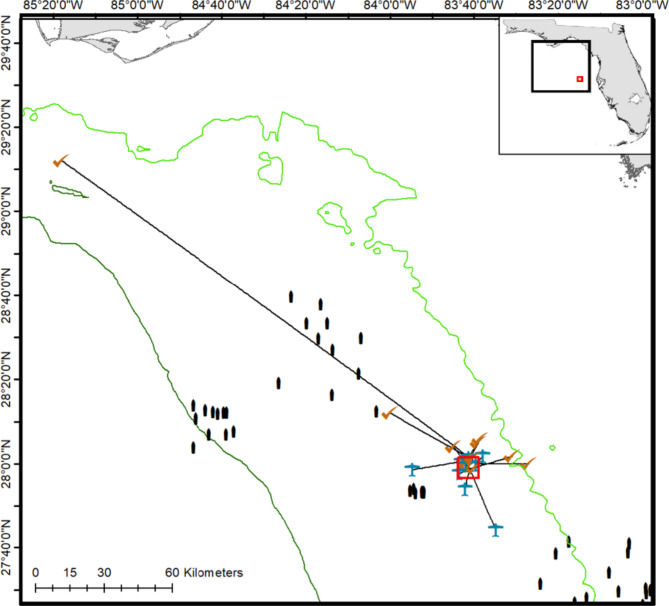
Site fidelity, space use, and dispersal are commonly estimated with acoustic telemetry (AT) to help inform management and conservation. These behaviors can change with age, habitat and environmental conditions and our ability to accurately estimate them is affected by a study's inference power (design components that affect how accurately detection data represents a species' movements). Red snapper (Lutjanus campechanus) have been extensively studied with AT over a range of time periods and regions, although primarily at artificial reefs (AR). Here, we use large (> 12 km2) acoustic positioning arrays to monitor a study area with low-relief hard bottom, a reef ledge, and an AR. Annual fidelity to the study area was estimated to be 54%, but estimates were affected by fate uncertainty and model choice. Emigration increased with storms and in early summer. Abundance was greatest at small habitat patches but space use did not scale with patch size. Although uncommon, long-distance movements and connectivity between habitats occurred, with a maximum dispersal of 206 km. Previous red snapper AT studies varied greatly in array size, study duration, and number of fish tracked, impacting inference power. This made it difficult to compare results and highlights the need for greater standardization in AT methods.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests. Ethics approval: No specific permission for the tagging protocol was needed as it was conducted by the Florida Fish and Wildlife Conservation Commission’s Fish and Wildlife Research Institute. However, every effort was made to meet all ethical standards.
Figures

References
-
- Lowerre-Barbieri, S. K. et al. Movescapes and eco-evolutionary movement strategies in marine fish: Assessing a connectivity hotspot. Fish Fish.22, 1321–1344 (2021).
-
- Riotte-Lambert, L. & Matthiopoulos, J. Environmental predictability as a cause and consequence of animal movement. Trends Ecol. Evol.35, 163–174 (2020). - PubMed
-
- Werner, E. & Gilliam, J. The Ontogenetic Niche and species interactions in size-structured populations. Annu. Rev. Ecol. Syst.15, 393–425 (1984).
-
- Lowerre-Barbieri, S. K., Burnsed, W., Bickford, J. W. & S. L., and Assessing reproductive behavior important to fisheries management: A case study with red drum, (Sciaenops ocellatus). Ecol. Appl.26, 979–995 (2016). - PubMed
-
- Hussey, N. et al. Aquatic animal telemetry: A panoramic window into the underwater world. Science348, 1255642 (2015). - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
