

Localization of Capsule Endoscope in Alimentary Tract by Computer-Aided Analysis of Endoscopic Images
- PMID: 39943388
- PMCID: PMC11820705
- DOI: 10.3390/s25030746
Localization of Capsule Endoscope in Alimentary Tract by Computer-Aided Analysis of Endoscopic Images
Abstract
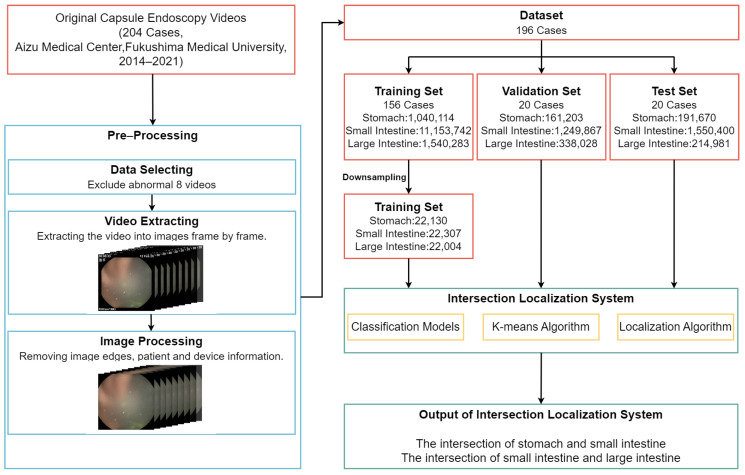
Capsule endoscopy is a common method for detecting digestive diseases. The location of a capsule endoscope should be constantly monitored through a visual inspection of the endoscopic images by medical staff to confirm the examination's progress. In this study, we proposed a computer-aided analysis (CADx) method for the localization of a capsule endoscope. At first, a classifier based on a Swin Transformer was proposed to classify each frame of the capsule endoscopy videos into images of the stomach, small intestine, and large intestine, respectively. Then, a K-means algorithm was used to correct outliers in the classification results. Finally, a localization algorithm was proposed to determine the position of the capsule endoscope in the alimentary tract. The proposed method was developed and validated using videos of 204 consecutive cases. The proposed CADx, based on a Swin Transformer, showed a precision of 93.46%, 97.28%, and 98.68% for the classification of endoscopic images recorded in the stomach, small intestine, and large intestine, respectively. Compared with the landmarks identified by endoscopists, the proposed method demonstrated an average transition time error of 16.2 s to locate the intersection of the stomach and small intestine, as well as 13.5 s to locate that of the small intestine and the large intestine, based on the 20 validation videos with an average length of 3261.8 s. The proposed method accurately localizes the capsule endoscope in the alimentary tract and may replace the laborious real-time visual inspection in capsule endoscopic examinations.
Keywords: capsule endoscopy; computer-aided analysis; deep learning; transformer.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures




References
-
- Mateen H., Basar R., Ahmed A.U., Ahmad M.Y. Localization of wireless capsule endoscope: A systematic review. IEEE Sens. J. 2017;17:1197–1206. doi: 10.1109/JSEN.2016.2645945. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
