

Integration of Euclidean and path distances in hippocampal maps
- PMID: 40016304
- PMCID: PMC11868619
- DOI: 10.1038/s41598-025-90504-3
Integration of Euclidean and path distances in hippocampal maps
Abstract
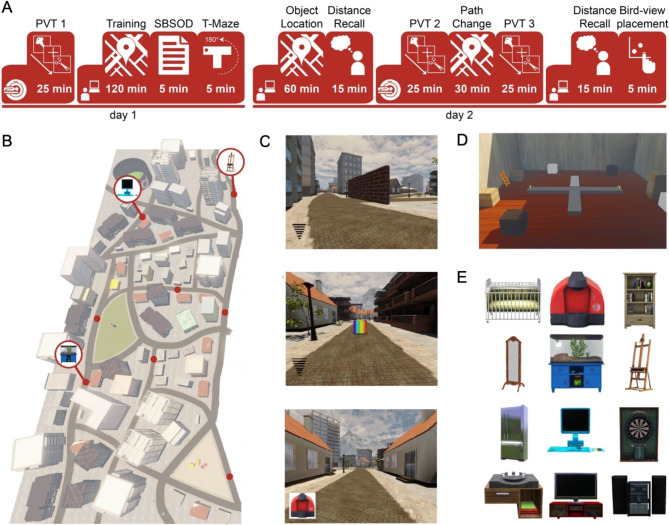
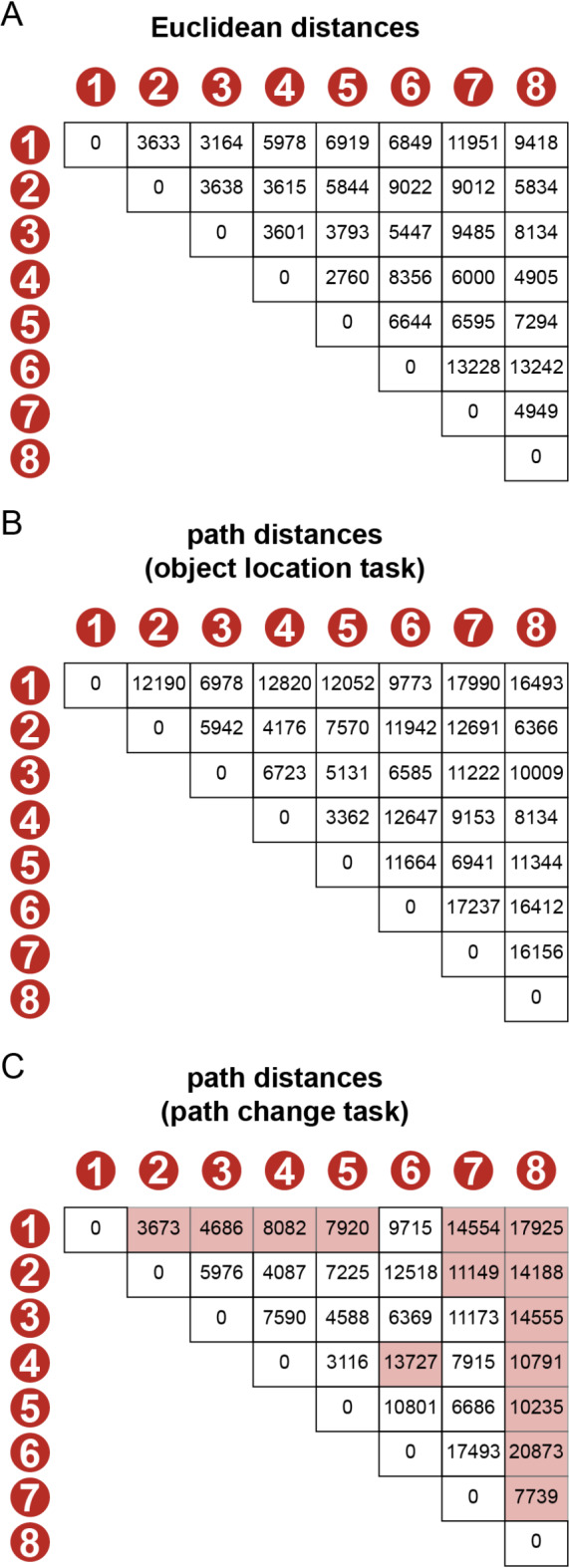
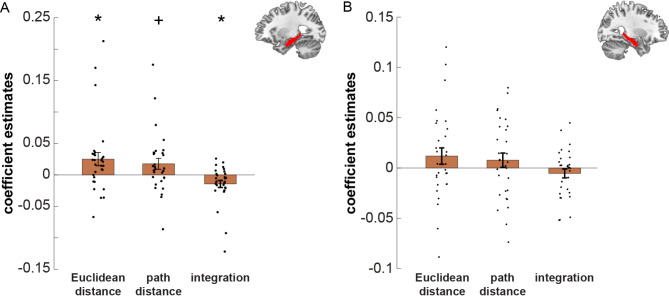
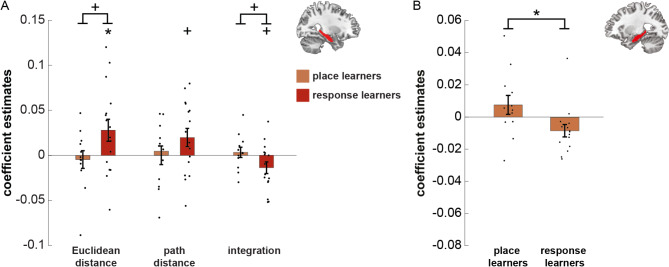
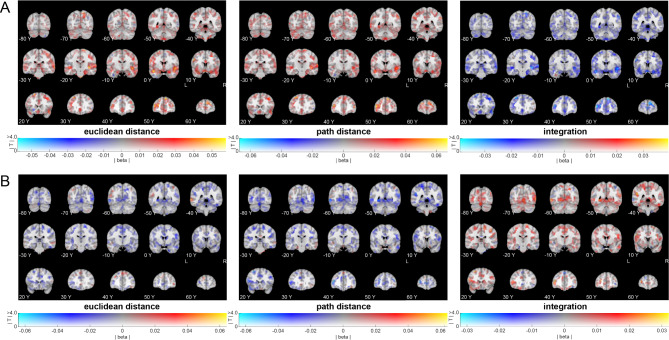
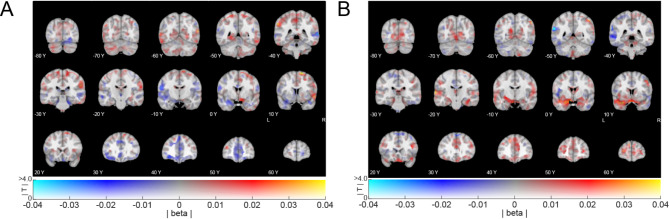
The hippocampus is a key region for forming mental maps of our environment. These maps represent spatial information such as distances between landmarks. A cognitive map can allow for flexible inference of spatial relationships that have never been directly experienced before. Previous work has shown that the human hippocampus encodes distances between locations, but it is unclear how Euclidean and path distances are distinguished. In this study, participants performed an object-location task in a virtual environment. We combined functional magnetic resonance imaging with representational similarity analysis to test how Euclidean and path distances are represented in the hippocampus. We observe that hippocampal neural pattern similarity for objects scales with distance between object locations, and suggest that the hippocampus integrates Euclidean and path distances. One key characteristic of cognitive maps is their adaptive and flexible nature. We therefore subsequently modified path distances between objects using roadblocks in the environment. We found that hippocampal pattern similarity between objects adapted as a function of these changes in path distance, selectively in route learners but not in map learners. Taken together, our study supports the idea that the hippocampus creates integrative and flexible cognitive maps.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures


References
-
- Tolman, E. C. Cognitive maps in rats and men. Psychol. Rev.55, 189–208 (1948). - PubMed
-
- O’Keefe, J. & Nadel, L. The Hippocampus as a Cognitive Map (Oxford University Press, 1978).
-
- Maguire, E. A. et al. Knowing where and getting there: A human navigation network. Science280, 921–924 (1998). - PubMed
-
- Burgess, N., Maguire, E. A. & O’Keefe, J. The human Hippocampus and spatial and episodic memory. Neuron35, 625–641 (2002). - PubMed
-
- McNaughton, B. L., Battaglia, F. P., Jensen, O., Moser, E. I. & Moser, M. B. Path integration and the neural basis of the ‘cognitive map’. Nat. Rev. Neurosci.7, 663–678 (2006). - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
