

Exploring the impact of myoelectric prosthesis controllers on visuomotor behavior
- PMID: 40075405
- PMCID: PMC11900612
- DOI: 10.1186/s12984-025-01604-0
Exploring the impact of myoelectric prosthesis controllers on visuomotor behavior
Abstract
Background: Prosthesis users often rely on vision to monitor the activity of their prosthesis, which can be cognitively demanding. This compensatory visual behaviour may be attributed to an absence of feedback from the prosthesis or the unreliability of myoelectric control. Unreliability can arise from the unpredictable control due to variations in electromyography signals that can occur when the arm moves through different limb positions during functional use. More robust position-aware control systems have been explored using deep learning methods, specifically ones that utilize data from different limb positions, that show promising improvements in control characteristics. However, it is unclear how these novel controllers will affect visuomotor behaviour. Specifically, the extent to which control interventions can influence gaze behaviours remain unknown, as previous studies have not yet demonstrated the sensitivity of eye metrics to these interventions. This study aims to explore how visuomotor behaviours change when individuals operate a simulated myoelectric prosthesis using a standard control strategy compared to a position-aware control strategy.
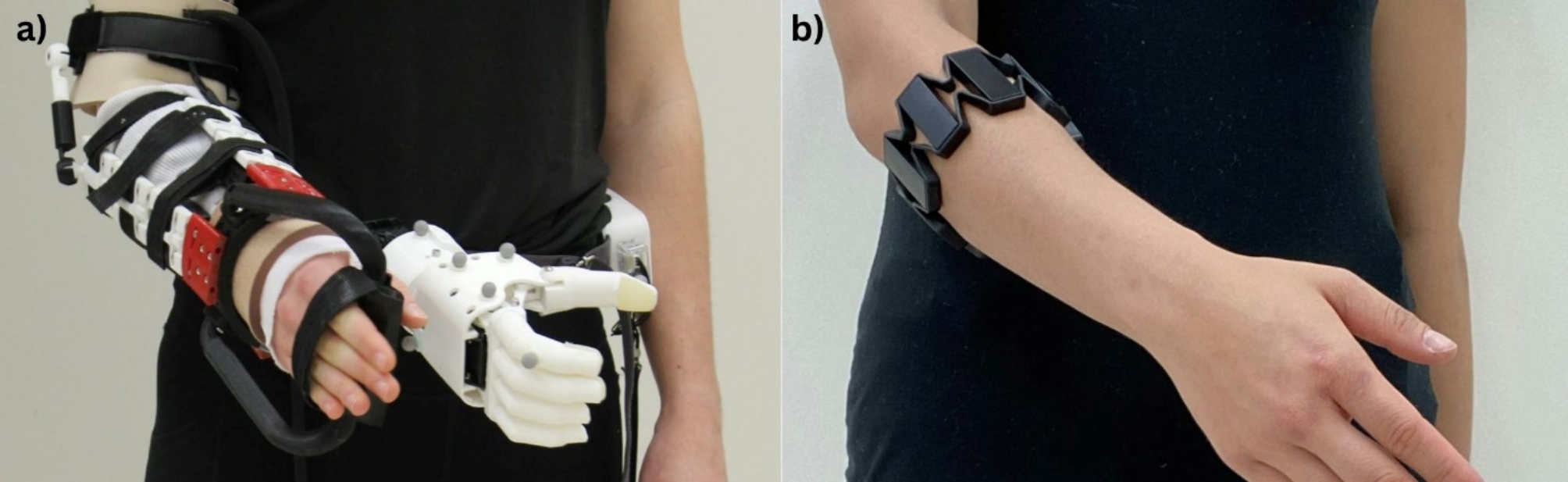
Methods: Participants without limb difference tested two control strategies in a within-subject crossover study design. They controlled a simulated myoelectric prosthesis using a standard control strategy and an advanced position-aware control strategy designed to address the limb position effect. The order in which these control strategies were evaluated was randomized. Eye tracking and motion capture data were collected during functional task execution to assess if using the position-aware control strategy changed visuomotor behaviour compared to the standard controller.
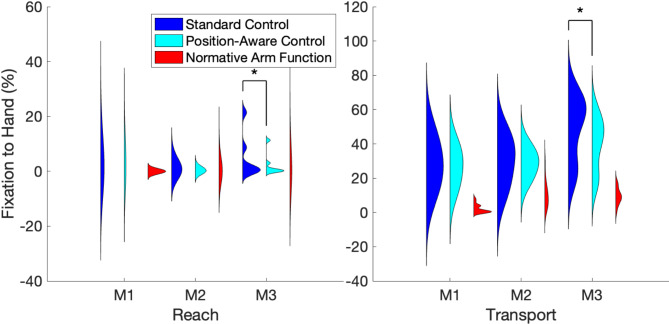
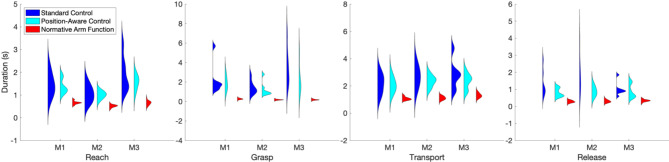
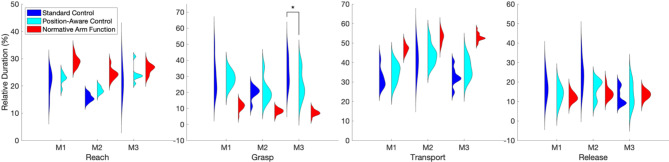
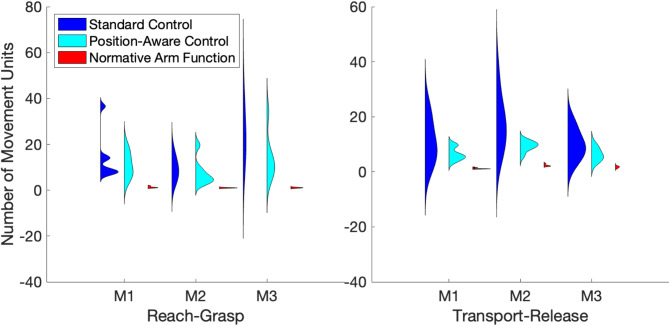
Results: There was less visual fixation on the prosthetic hand in the fully extended and cross-body arm position when using the position-aware controller compared to the standard controller. These changes were associated with shorter grasp phase duration and increased smoothness of prosthesis movements. These findings indicated that using the position-aware control strategy may have resulted in less reliance on vision to monitor the prosthesis actions in limb positions where they had better prosthesis control.
Conclusions: This research suggests that visuomotor metrics may be sensitive to prosthesis control interventions, and therefore the use of eye tracking should be considered for performance assessment of prosthesis control.
Keywords: Control strategy; Deep learning; Electromyography; Eye tracking; Gaze behaviour; Limb position effect; Motion capture; Myoelectric prosthesis; Upper limb prosthesis; Visuomotor behaviour.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Ethics approval and consent to participate: This study was approved by the University of Alberta Health Research Ethics Board (Pro00086557). All participants provided written informed consent to participate in this study. Consent for publication: All participants provided written informed consent for publication. Competing interests: The authors declare no competing interests.
Figures
References
-
- Parr JVV, Vine SJ, Harrison NR, Wood G. Examining the Spatiotemporal disruption to gaze when using a myoelectric prosthetic hand. J Mot Behav. 2018;50:416–25. - PubMed
-
- Land MF, Hayhoe M. In what ways do eye movements contribute to everyday activities? Vis Res. 2001;41:3559–65. - PubMed
-
- Hayhoe M, Ballard D. Eye movements in natural behavior. Trends Cogn Sci. 2005;9:188–94. - PubMed
-
- Land MF. Vision, eye movements, and natural behavior. Vis Neurosci. 2009;26:51–62. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
