

A multi-scale small object detection algorithm SMA-YOLO for UAV remote sensing images
- PMID: 40102487
- PMCID: PMC11920586
- DOI: 10.1038/s41598-025-92344-7
A multi-scale small object detection algorithm SMA-YOLO for UAV remote sensing images
Abstract
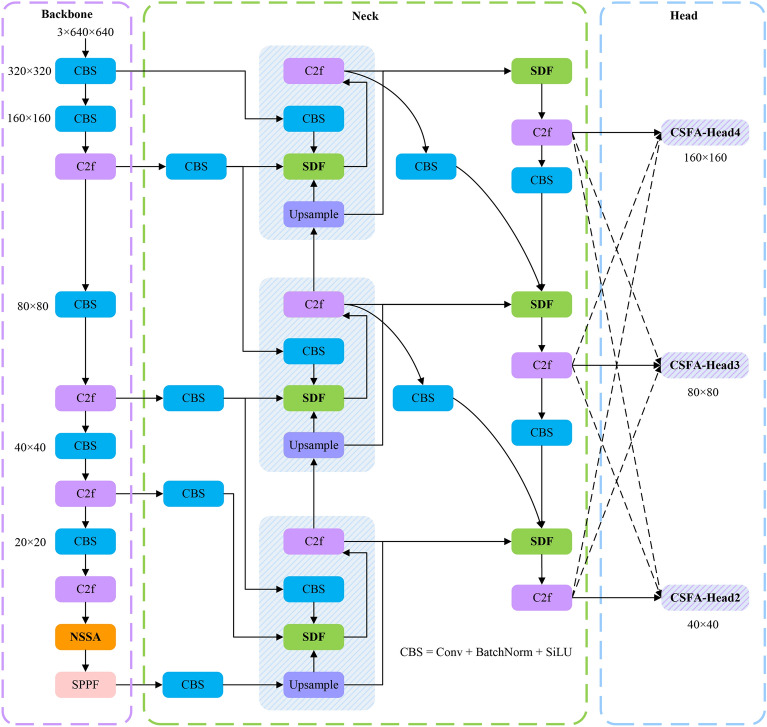
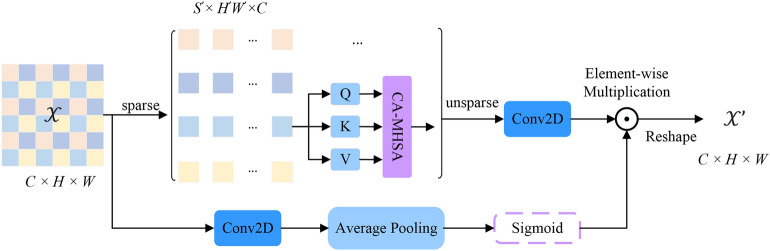
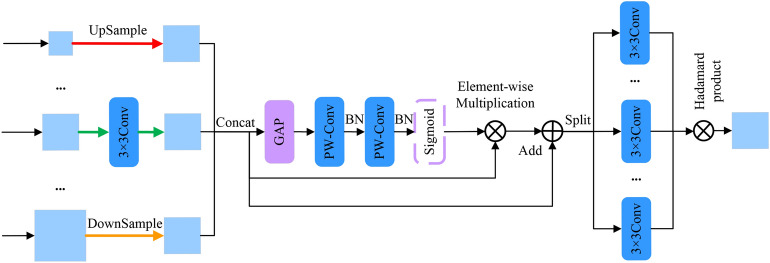
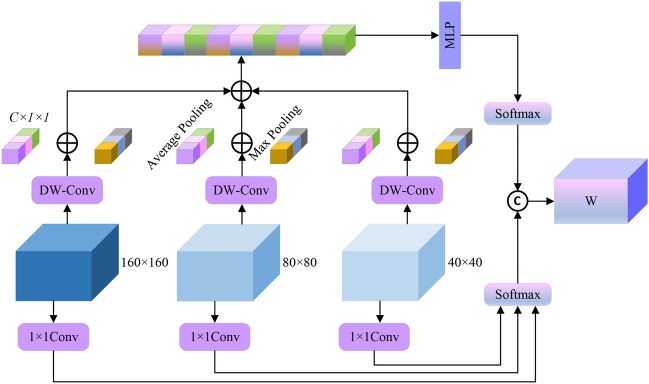
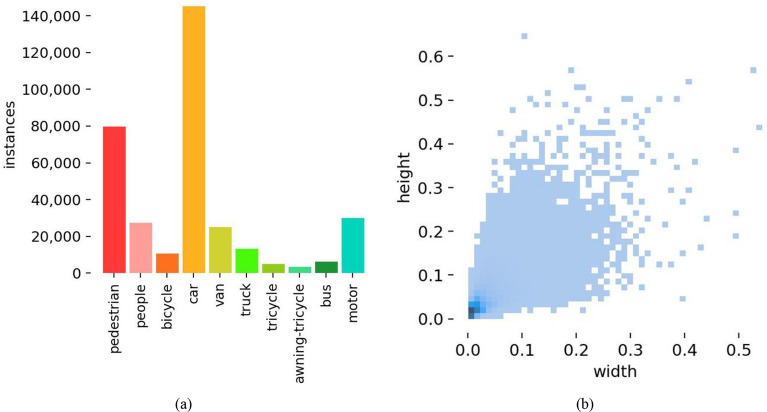
Detecting small objects in complex remote sensing environments presents significant challenges, including insufficient extraction of local spatial information, rigid feature fusion, and limited global feature representation. In addition, improving model performance requires a delicate balance between improving accuracy and managing computational complexity. To address these challenges, we propose the SMA-YOLO algorithm. First, we introduce the Non-Semantic Sparse Attention (NSSA) mechanism in the backbone network, which efficiently extracts non-semantic features related to the task, thus improving the model's sensitivity to small objects. In the model's throat, we design a Bidirectional Multi-Branch Auxiliary Feature Pyramid Network (BIMA-FPN), which integrates high-level semantic information with low-level spatial details, improving small object detection while expanding multi-scale receptive fields. Finally, we incorporate a Channel-Space Feature Fusion Adaptive Head (CSFA-Head), which fully handles multi-scale features and adaptively handles consistency problems of different scales, further improving the robustness of the model in complex scenarios. Experimental results on the VisDrone2019 dataset show that SMA-YOLO achieves a 13% improvement in mAP compared to the baseline model, demonstrating exceptional adaptability in small object detection tasks for remote sensing imagery. These results provide valuable insights and new approaches to further advance research in this area.
Keywords: Feature fusion; Multi-branch auxiliary; Object detection; Remote sensing images.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests. Additional information: The corresponding author is responsible for submitting a competing interests statement on behalf of all authors of the paper. This statement must be included in the submitted article file.
Figures
Similar articles
-
RFAG-YOLO: A Receptive Field Attention-Guided YOLO Network for Small-Object Detection in UAV Images.Sensors (Basel). 2025 Mar 30;25(7):2193. doi: 10.3390/s25072193. Sensors (Basel). 2025. PMID: 40218706 Free PMC article.
-
An object detection model AAPW-YOLO for UAV remote sensing images based on adaptive convolution and reconstructed feature fusion.Sci Rep. 2025 May 9;15(1):16214. doi: 10.1038/s41598-025-00239-4. Sci Rep. 2025. PMID: 40346071 Free PMC article.
-
OD-YOLO: Robust Small Object Detection Model in Remote Sensing Image with a Novel Multi-Scale Feature Fusion.Sensors (Basel). 2024 Jun 3;24(11):3596. doi: 10.3390/s24113596. Sensors (Basel). 2024. PMID: 38894387 Free PMC article.
-
Lightweight multidimensional feature enhancement algorithm LPS-YOLO for UAV remote sensing target detection.Sci Rep. 2025 Jan 8;15(1):1340. doi: 10.1038/s41598-025-85488-z. Sci Rep. 2025. PMID: 39779765 Free PMC article.
-
SED-YOLO based multi-scale attention for small object detection in remote sensing.Sci Rep. 2025 Jan 24;15(1):3125. doi: 10.1038/s41598-025-87199-x. Sci Rep. 2025. PMID: 39856170 Free PMC article.
Cited by
-
HSF-YOLO: A Multi-Scale and Gradient-Aware Network for Small Object Detection in Remote Sensing Images.Sensors (Basel). 2025 Jul 12;25(14):4369. doi: 10.3390/s25144369. Sensors (Basel). 2025. PMID: 40732496 Free PMC article.
References
-
- Hasan, A. F. et al. Fractional order extended state observer enhances the performance of controlled tri-copter uav based on active disturbance rejection control. in Mobile Robot: Motion Control and Path Planning, 439–487 (Springer, 2023).
-
- Beg, A., Qureshi, A. R., Sheltami, T. & Yasar, A. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city. Personal Ubiquit. Comput.25, 33–50 (2021).
-
- Liu, K. & Zheng, J. UAV trajectory optimization for time-constrained data collection in UAV-enabled environmental monitoring systems. IEEE Internet Things J.9, 24300–24314 (2022).
-
- Yan, Y., Chen, X., Shi, M. & Li, R. A decision support system architecture for intelligent driven unmanned aerial vehicles maritime search and rescue. in 2024 10th international symposium on system security, safety, and reliability (ISSSR), 424–428 (IEEE, 2024).
-
- Wu, J., Wang, H. & Zhang, M. Urban crowd surveillance in an emergency using unmanned air vehicles. J. Guid. Control. Dyn.43, 838–846 (2020).
LinkOut - more resources
Full Text Sources
