Toward Cyborg: Exploring Long-Term Clinical Outcomes of a Multi-Degree-of-Freedom Myoelectric Prosthetic Hand
- PMID: 40103650
- PMCID: PMC11913783
- DOI: 10.34133/cbsystems.0195
Toward Cyborg: Exploring Long-Term Clinical Outcomes of a Multi-Degree-of-Freedom Myoelectric Prosthetic Hand
Abstract
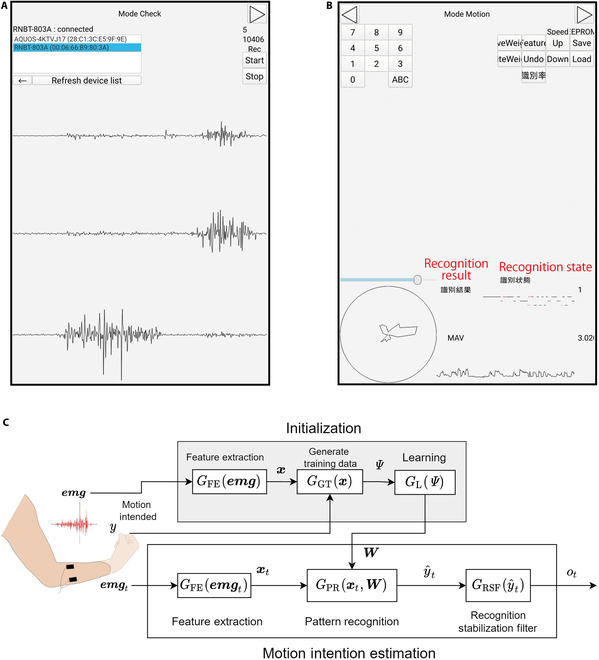
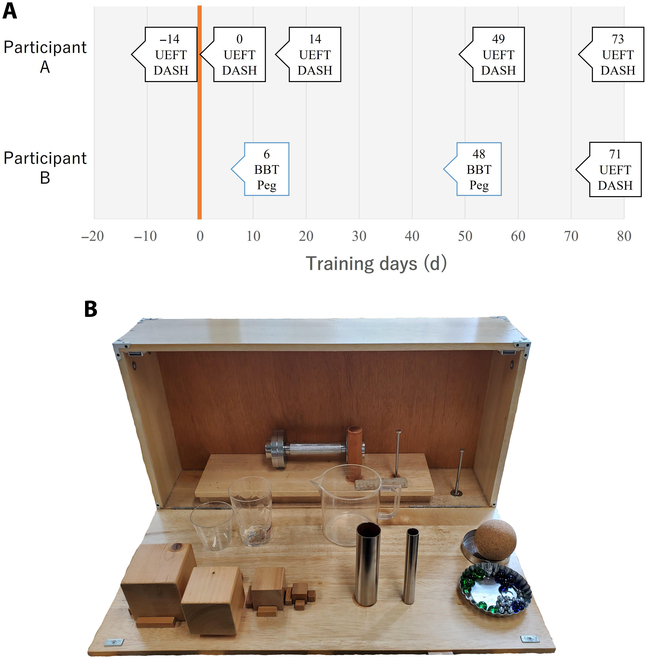
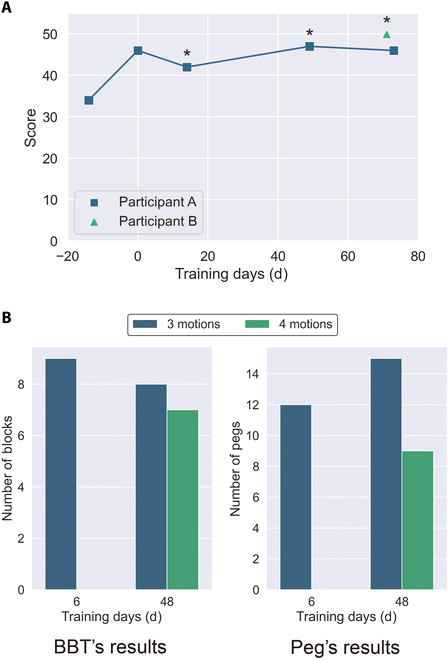
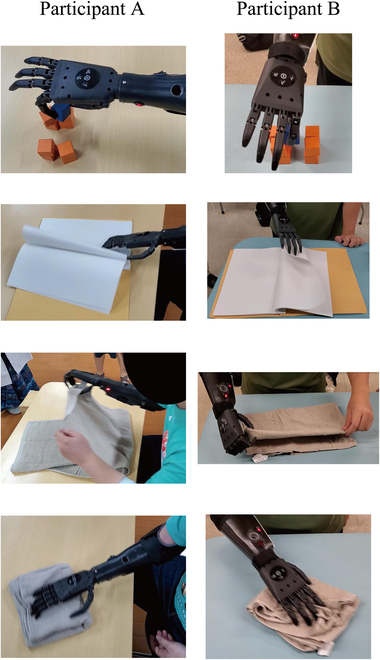
Recent advancements in robotics and sensor technology have facilitated the development of myoelectric prosthetic hands (MPHs) featuring multiple degrees of freedom and heightened functionality, but their practical application has been limited. In response to this situation, formulating a control theory ensuring the hand dexterity of highly functional MPHs has garnered marked attention. Progress in this field has been directed toward employing machine-learning algorithms to process electromyogram patterns, enabling a broad spectrum of hand movements. In particular, the practical application of 5-finger-driven MPHs with such control functions to real users remains limited, and their attributes and challenges have not been thoroughly examined. In this study, we developed a 5-finger MPH equipped with pattern recognition capabilities. Through a long-term clinical trial, encompassing task assessments and subjective evaluations via questionnaires, we explored the MPH's range of applications. The task assessments revealed an expanded range of achievable tasks as the variety of motions increased. However, this enhanced adaptability was paralleled by a decrease in control reliability. Additionally, findings from the questionnaires indicated that enhancements in task performance with MPHs might be more effective in reducing workplace-related disability than in improving activities in everyday life. This study offers valuable insights into the long-term clinical prospects and constraints associated with multi-degree-of-freedom MPHs incorporating pattern recognition functionality.
Copyright © 2025 Yuki Kuroda et al.
Conflict of interest statement
Competing interests: The authors declare that they have no competing interests.
Figures




Similar articles
-
Learning from demonstration: Teaching a myoelectric prosthesis with an intact limb via reinforcement learning.IEEE Int Conf Rehabil Robot. 2017 Jul;2017:1457-1464. doi: 10.1109/ICORR.2017.8009453. IEEE Int Conf Rehabil Robot. 2017. PMID: 28814025
-
A myoelectric prosthetic hand with muscle synergy-based motion determination and impedance model-based biomimetic control.Sci Robot. 2019 Jun 26;4(31):eaaw6339. doi: 10.1126/scirobotics.aaw6339. Sci Robot. 2019. PMID: 33137769
-
Gaussian Process Autoregression for Simultaneous Proportional Multi-Modal Prosthetic Control With Natural Hand Kinematics.IEEE Trans Neural Syst Rehabil Eng. 2017 Oct;25(10):1785-1801. doi: 10.1109/TNSRE.2017.2699598. Epub 2017 Aug 31. IEEE Trans Neural Syst Rehabil Eng. 2017. PMID: 28880183
-
Control Capabilities of Myoelectric Robotic Prostheses by Hand Amputees: A Scientific Research and Market Overview.Front Syst Neurosci. 2015 Nov 30;9:162. doi: 10.3389/fnsys.2015.00162. eCollection 2015. Front Syst Neurosci. 2015. PMID: 26648850 Free PMC article. Review.
-
A Review of Myoelectric Control for Prosthetic Hand Manipulation.Biomimetics (Basel). 2023 Jul 24;8(3):328. doi: 10.3390/biomimetics8030328. Biomimetics (Basel). 2023. PMID: 37504216 Free PMC article. Review.
References
-
- Chappell PH, Cranny A, Cotton DP, White NM, Beeby SP. Sensory motor systems of artificial and natural hands. Int J Surg. 2007;6(5):436–440. - PubMed
-
- Hakonen M, Piitulainen H, Visala A. Current state of digital signal processing in myoelectric interfaces and related applications. Biomed Signal Process Control. 2015;18:334–359.
-
- Ottobock. bebionic hand. Ottobock. 2025. [accessed 27 Feb 2025] https://www.ottobockus.com/prosthetics/upper-limb-prosthetics/solution-o...
LinkOut - more resources
Full Text Sources