

Tactile, Audio, and Visual Dataset During Bare Finger Interaction with Textured Surfaces
- PMID: 40122908
- PMCID: PMC11930942
- DOI: 10.1038/s41597-025-04670-0
Tactile, Audio, and Visual Dataset During Bare Finger Interaction with Textured Surfaces
Abstract
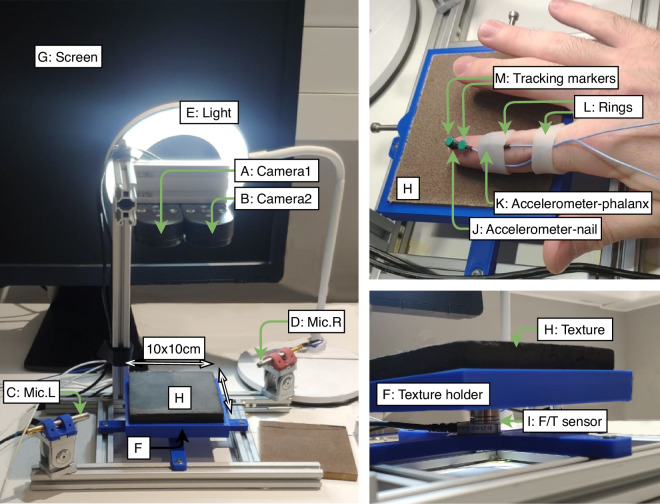
This paper presents a comprehensive multi-modal dataset capturing concurrent haptic, audio, and visual signals recorded from ten participants as they interacted with ten different textured surfaces using their bare fingers. The dataset includes stereoscopic images of the textures, and fingertip position, speed, applied load, emitted sound, and friction-induced vibrations, providing an unprecedented insight into the complex dynamics underlying human tactile perception. Our approach utilizes a human finger (while most previous studies relied on rigid sensorized probes), enabling the naturalistic acquisition of haptic data and addressing a significant gap in resources for studies of human tactile exploration, perceptual mechanisms, and artificial tactile perception. Additionally, fifteen participants completed a questionnaire to evaluate their subjective perception of the surfaces. Through carefully designed data collection protocols, encompassing both controlled and free exploration scenarios, this dataset offers a rich resource for studying human multi-sensory integration and supports the development of algorithms for texture recognition based on multi-modal inputs. A preliminary analysis demonstrates the dataset's potential, as classifiers trained on different combinations of data modalities show promising accuracy in surface identification, highlighting its value for advancing research in multi-sensory perception and the development of human-machine interfaces.
© 2025. The Author(s).
Conflict of interest statement
Competing interests: The authors declare no competing interests.
Figures








References
-
- Durrant-Whyte, H. F. Sensor models and multisensor integration. The International Journal of Robotics Research7, 97–113 (1988).
-
- Ernst, M. O. & Bülthoff, H. H. Merging the senses into a robust percept. Trends in Cognitive Sciences8, 162–169, 10.1016/j.tics.2004.02.002 (2004). - PubMed
-
- Bertelson, P. & De Gelder, B. The psychology of multimodal perception. Crossmodal Space and Crossmodal Attention 141–177 (2004).
-
- Munoz, N. E. & Blumstein, D. T. Multisensory perception in uncertain environments. Behavioral Ecology23, 457–462 (2012).
-
- Anderson, B. L. Stereoscopic surface perception. Neuron24, 919–928 (1999). - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
