

Enhancing Grasping Function with a Thermoresponsive Ionogel Adhesive Glove for Patients with Rheumatic Diseases
- PMID: 40140959
- PMCID: PMC12245102
- DOI: 10.1002/advs.202414761
Enhancing Grasping Function with a Thermoresponsive Ionogel Adhesive Glove for Patients with Rheumatic Diseases
Abstract
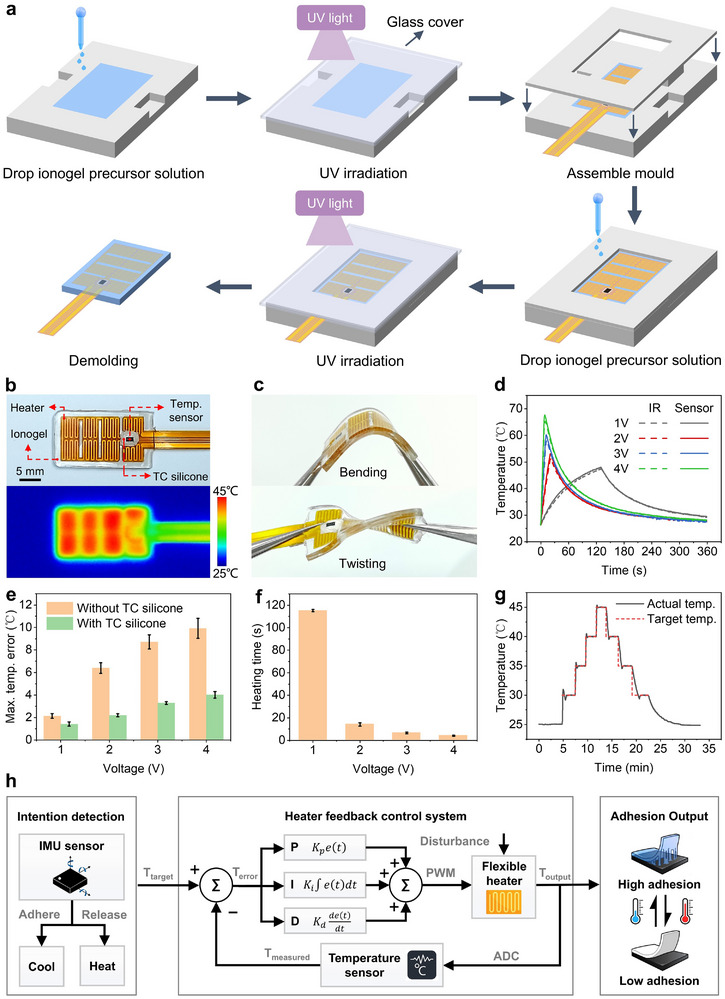
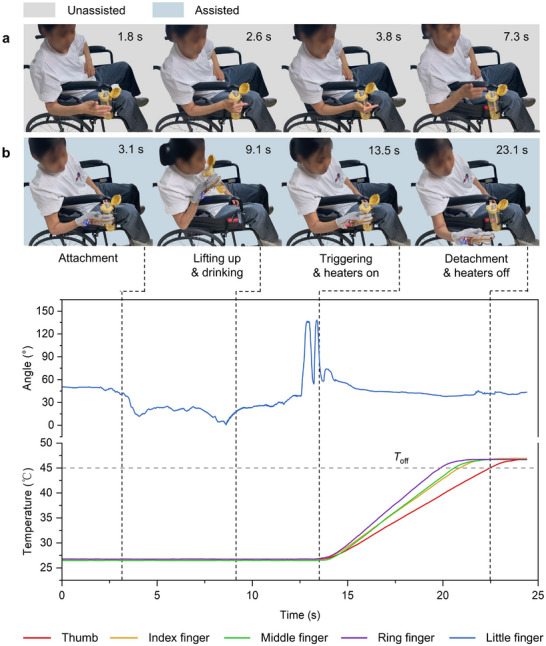
Rheumatic diseases often result in joint deformities and peripheral nerve damage, leading to impaired hand function. Current wearable assistive gloves commonly rely on external forces to flex fingers for grasping, but they face limitations such as bulky hardware, complex finger manipulation, and a risk of joint injuries. This study presents a lightweight, portable, soft wearable adhesive glove based on thermoresponsive ionogels aimed at enhancing grasping function. The ionogel exhibits high adhesion (≈35 kPa to various materials) at 25 °C and low adhesion (≈6.8 kPa) at 45 °C. Smart adhesive pads use embedded flexible heaters and temperature sensors for closed-loop control of the ionogels' temperature, providing programmable adhesion. A rapid switch from high to low adhesion is achieved within 4 s at 4 V. Additionally, a hands-free control interface uses inertial measurement units to detect the user's intent to release, facilitating easy and intuitive detachment. Weighing only 47 g, the glove is 7.2 times lighter than existing assistive gloves. Notably, it empowers users to grasp and release a variety of objects that will otherwise be unmanageable. Evaluation of various activities of daily living demonstrates that the glove significantly enhances grasping ability and increases autonomy for patients with rheumatic diseases.
Keywords: hand exoskeleton; medical robotics; soft robotics; switchable adhesion; wearable robotics.
© 2025 The Author(s). Advanced Science published by Wiley‐VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures





Similar articles
-
A Sensorized Soft Robotic Hand with Adhesive Fingertips for Multimode Grasping and Manipulation.Soft Robot. 2024 Aug;11(4):698-708. doi: 10.1089/soro.2023.0099. Epub 2024 Mar 14. Soft Robot. 2024. PMID: 38484295
-
Sexual Harassment and Prevention Training.2024 Mar 29. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. 2024 Mar 29. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. PMID: 36508513 Free Books & Documents.
-
From Skin Movement to Wearable Robotics: The Case of Robotic Gloves.Soft Robot. 2024 Oct;11(5):755-766. doi: 10.1089/soro.2023.0115. Epub 2024 Jan 18. Soft Robot. 2024. PMID: 38237109
-
Reading aids for adults with low vision.Cochrane Database Syst Rev. 2018 Apr 17;4(4):CD003303. doi: 10.1002/14651858.CD003303.pub4. Cochrane Database Syst Rev. 2018. PMID: 29664159 Free PMC article.
-
Exercise for hand osteoarthritis.Cochrane Database Syst Rev. 2017 Jan 31;1(1):CD010388. doi: 10.1002/14651858.CD010388.pub2. Cochrane Database Syst Rev. 2017. PMID: 28141914 Free PMC article.
References
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources