

Combining neural stimulation and a powered exoskeletal knee to enhance walking after stroke
- PMID: 40144145
- PMCID: PMC11938448
- DOI: 10.1177/20556683251329256
Combining neural stimulation and a powered exoskeletal knee to enhance walking after stroke
Abstract
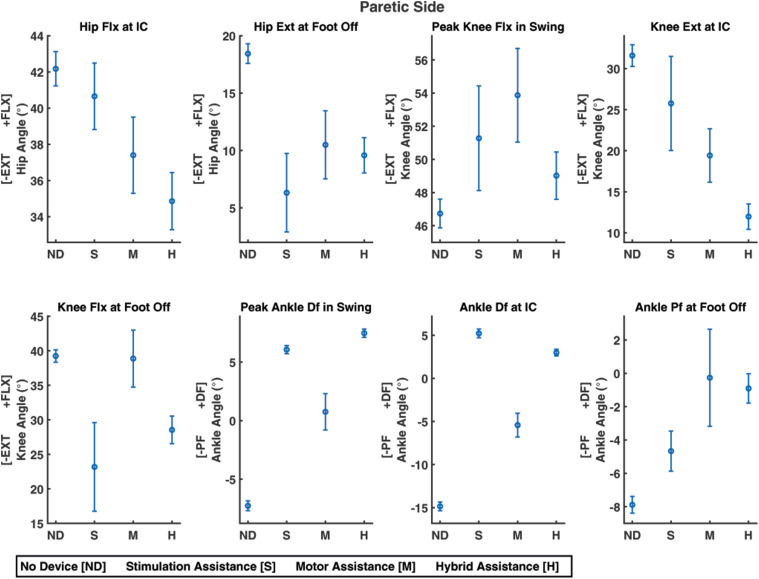
Introduction: In this study, we developed a unilateral, hybrid exoskeleton designed to augment post-stroke mobility through integration of noninvasive neural stimulation and a motorized knee orthosis. We evaluated proof of concept for this hybrid exoskeleton in a stroke survivor by assessing whether: (1) the motor and transmission possess sufficient backdrivability to facilitate effective muscle-generated movements, (2) the motor can independently drive movement, and (3) the combined application of stimulation and motor generate kinematic improvements superior to either modality used in isolation. Methods: The device was evaluated on an ambulatory stroke survivor under four overground walking conditions: (1) without the device, (2) stimulation only while wearing the exoskeleton, (3) motor assistance only, and (4) hybrid stimulated and motorized assistance. A motion capture system was used to obtain lower limb joint angles to assess the differences in each walking condition. Results: Changes towards neurotypical hip, knee and ankle angles were found between the gait with no device compared to the assistive conditions. Hip-knee cyclograms suggest hybrid assistance most resembled neurotypical gait. Conclusions: Individually, neural stimulation and motor assistance resulted in improved gait kinematics and hybrid assistance provided greater improvement than each form of individual assistance.
Keywords: Hybrid exoskeleton; kinematics; musculoskeletal; neural stimulation; stroke rehabilitation.
© The Author(s) 2025.
Conflict of interest statement
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Figures







Similar articles
-
A muscle-driven approach to restore stepping with an exoskeleton for individuals with paraplegia.J Neuroeng Rehabil. 2017 May 30;14(1):48. doi: 10.1186/s12984-017-0258-6. J Neuroeng Rehabil. 2017. PMID: 28558835 Free PMC article.
-
Toward a hybrid exoskeleton for crouch gait in children with cerebral palsy: neuromuscular electrical stimulation for improved knee extension.J Neuroeng Rehabil. 2020 Sep 3;17(1):121. doi: 10.1186/s12984-020-00738-7. J Neuroeng Rehabil. 2020. PMID: 32883297 Free PMC article. Clinical Trial.
-
Mechanics and energetics of post-stroke walking aided by a powered ankle exoskeleton with speed-adaptive myoelectric control.J Neuroeng Rehabil. 2019 May 15;16(1):57. doi: 10.1186/s12984-019-0523-y. J Neuroeng Rehabil. 2019. PMID: 31092269 Free PMC article.
-
Effect of wearable exoskeleton on post-stroke gait: A systematic review and meta-analysis.Ann Phys Rehabil Med. 2023 Feb;66(1):101674. doi: 10.1016/j.rehab.2022.101674. Epub 2022 Nov 30. Ann Phys Rehabil Med. 2023. PMID: 35525427
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
References
-
- Olney SJ, Richards CL. Hemiparetic gait following stroke . Part I : characteristics. Gait Posture 1996; 4: 136–148.
-
- Woolley SM. Characteristics of gait in hemiplegia. Top Stroke Rehabil 2001; 7: 1–18. - PubMed
-
- Kramers De Quervain IA, Simon SR, Leurgans S, et al. Gait pattern in the early recovery period after stroke. J Bone Joint Surg 1996; 78: 1506–1514. - PubMed
-
- Moore S. Observation and analysis of hemiplegic gait: stance phase. Aust J Physiother 1993; 39: 259–267. - PubMed
-
- Herbert R. Observation and analysis of hemiplegic gait: swing phase. Aust J Physiother 1993; 39: 271–278. - PubMed
LinkOut - more resources
Full Text Sources
