

The continuous actuation of liquid metal with a 3D-printed electrowetting device
- PMID: 40177535
- PMCID: PMC11958460
- DOI: 10.1007/s44258-025-00052-8
The continuous actuation of liquid metal with a 3D-printed electrowetting device
Abstract
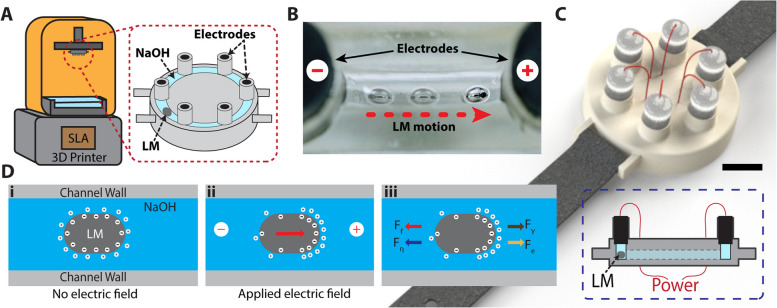
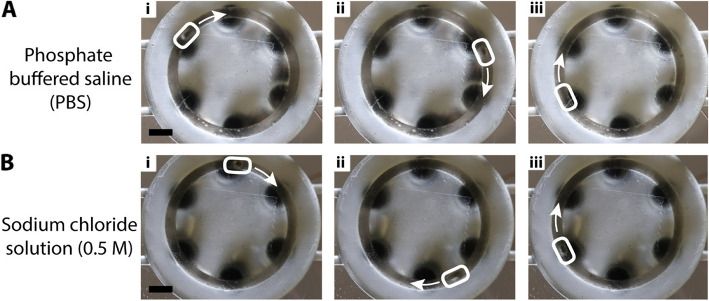
The ability of liquid metals (LMs) to recover from repeated stretching and deformation is a particularly attractive attribute for soft bioelectronics. In addition to their high electrical and thermal conductivity, LMs can be actuated, potentially enabling highly durable electro-mechanical and microfluidics systems for applications such as cooling, drug delivery, or reconfigurable electronics. In particular, continuous electrowetting (CEW) phenomena can actuate liquid metal at relatively low voltage and affordable power requirements for wearable systems (~ < 10 V, ~ 10 - 100 µW) by inducing a surface tension gradient across the LM. However, sustaining LM actuation remains challenging due to factors such as electrolyte depletion, polarity changes in multi-electrode systems, and limitations related to LM composition. Here, we demonstrate LM actuation in a circular conduit for prolonged durations of at least nine hours. We enabled sustained actuation by sequentially applying short, direct current (DC) pulses through a multi-electrode system based on the dynamics of LM actuation. As a proof of concept, we also demonstrated the ability of LM to transport electrically conducting, non-conducting, and magnetic materials within a microchannel and show the liquid metal actuation system can be potentially miniaturized to the size of a wearable device. We envision that with further miniaturization of the device architectures, our CEW platform can enable future integration of low-voltage electro-mechanical systems into a broad range of wearable form factors.
Supplementary information: The online version contains supplementary material available at 10.1007/s44258-025-00052-8.
Keywords: 3D printing; Cargo transport; Electrowetting; Liquid metal actuation.
© The Author(s) 2025.
Conflict of interest statement
Competing interestsYLK is an inventor on multiple patents and patent applications describing 3D printing technologies, including active electronic materials and devices, and multifunctional hybrid devices.
Figures





References
-
- Zhao X, Zhou Y, Li A, Xu J, Karjagi S, Hahm E, Rulloda L, Li J, Hollister J, Kavehpour P, Chen J. A self-filtering liquid acoustic sensor for voice recognition Nat. Electron. 2024;7:924–32.
-
- Zhou Y, Zhao X, Xu J, Fang Y, Chen G, Song Y, Li S, Chen J. Giant magnetoelastic effect in soft systems for bioelectronics Nat. Mater. 2021;20:1670–6. - PubMed
-
- Zhao X, Zhou Y, Song Y, Xu J, Li J, Tat T, Chen G, Li S, Chen J. Permanent fluidic magnets for liquid bioelectronics Nat. Mater. 2024;23:703–10. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials