

Analysis of the spatio-temporal dynamics of a Rho-GEF-H1-myosin activator-inhibitor reaction-diffusion system
- PMID: 40182954
- PMCID: PMC11966648
- DOI: 10.1098/rsos.241077
Analysis of the spatio-temporal dynamics of a Rho-GEF-H1-myosin activator-inhibitor reaction-diffusion system
Abstract
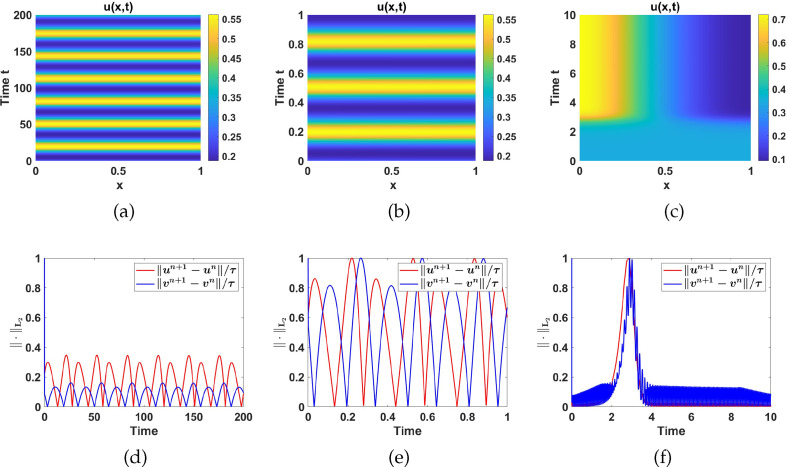
This study presents a detailed mathematical analysis of the spatio-temporal dynamics of the RhoA-GEF-H1-myosin signalling network, modelled as a coupled system of reaction-diffusion equations. By employing conservation laws and the quasi-steady state approximation, the dynamics is reduced to a tractable nonlinear system. First, we analyse the temporal system of ordinary differential equations (ODE) in the absence of spatial variation, characterizing stability, bifurcations and oscillatory behaviour through phase-plane analysis and bifurcation theory. As parameter values change, the temporal system transitions between stable dynamics; unstable steady states characterized by oscillatory dynamics; and co-existence between locally stable steady states, or co-existence between a locally stable steady state and a locally stable limit cycle. Second, we extend the analysis to the reaction-diffusion system by incorporating diffusion to the temporal ODE model, leading to a comprehensive study of Turing instabilities and spatial pattern formation. In particular, by adding appropriate diffusion to the temporal model: (i) the uniform steady state can be destabilized leading to the well-known Turing diffusion-driven instability (DDI); (ii) one of the uniform stable steady states in the bistable region can be driven unstable, while the other one remains stable, leading to the formation of travelling wave fronts; and (iii) a stable limit cycle can undergo DDI leading to the formation of spatial patterns. More importantly, the interplay between bistability and diffusion shows how travelling wavefronts can emerge, consistent with experimental observations of cellular contractility pulses. Theoretical results are supported by numerical simulations, providing key insights into the parameter spaces that govern pattern transitions and diffusion-driven instabilities.
Keywords: Rho-GEF-Myosin signalling network; Turing diffusion-driven instability; activator-inhibitor system; bifurcation analysis; reaction-diffusion; travelling wave front.
© 2025 The Authors.
Conflict of interest statement
We declare we have no competing interests.
Figures
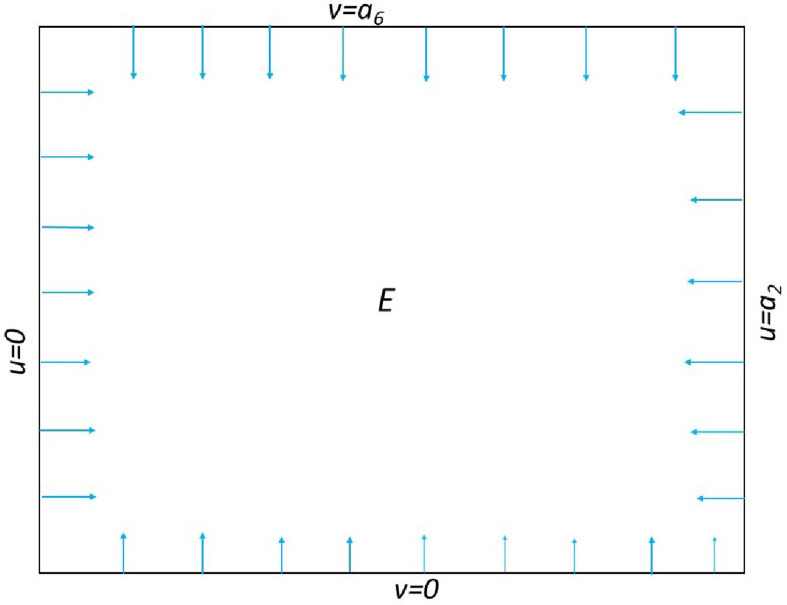
![A schematic representation of the experimental model for Rho-GEF-Myosin signalling network from which mathematical equations are derived [21]](https://cdn.ncbi.nlm.nih.gov/pmc/blobs/ca9a/11966648/f5610c784adb/rsos.241077.f001.jpg)



















References
-
- Ridley A, Peckham M, Clark P. 2004. Cell motility: from molecules to organisms. Chichester, England, UK: John Wiley & Sons.
LinkOut - more resources
Full Text Sources
Research Materials
