

DBO-AWOA: An Adaptive Whale Optimization Algorithm for Global Optimization and UAV 3D Path Planning
- PMID: 40218847
- PMCID: PMC11990930
- DOI: 10.3390/s25072336
DBO-AWOA: An Adaptive Whale Optimization Algorithm for Global Optimization and UAV 3D Path Planning
Abstract
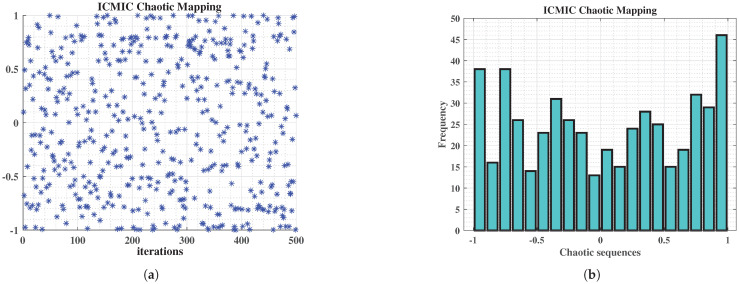
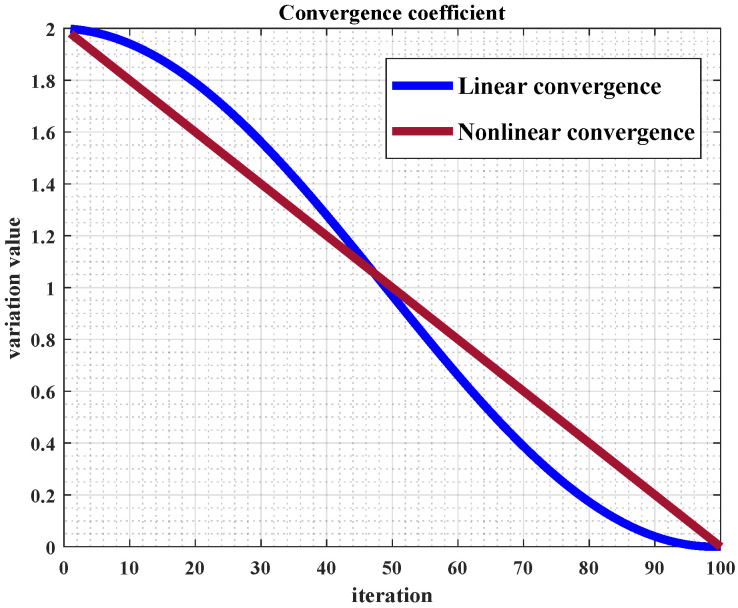
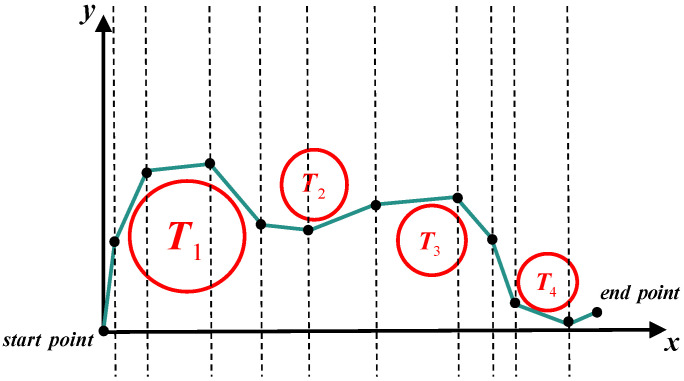
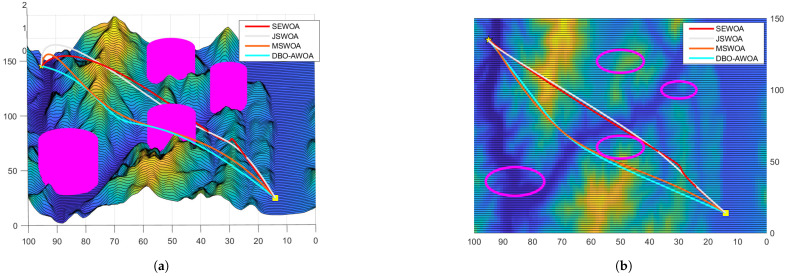
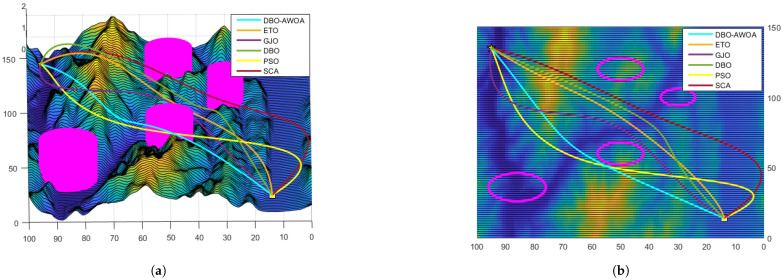
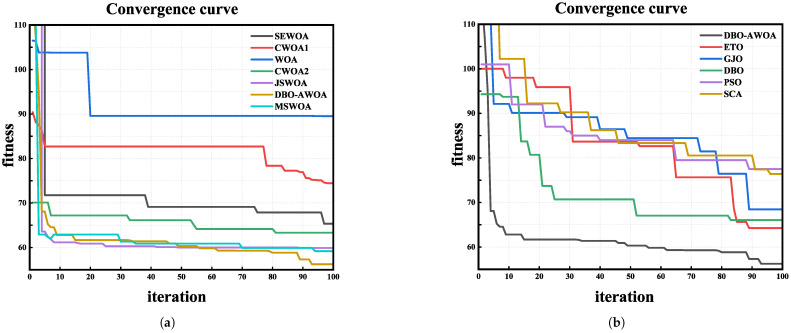
The rapid expansion of unmanned aerial vehicle (UAV) applications in complex environments presents significant challenges in 3D path planning, particularly in overcoming the limitations of traditional methods for dynamic obstacle avoidance and computational efficiency. To address these challenges, this study introduces an adaptive whale optimization algorithm (DBO-AWOA), which incorporates chaotic mapping, nonlinear convergence factors, adaptive inertia mechanisms, and dung beetle optimizer-inspired reproductive behaviors. Specifically, the algorithm utilizes ICMIC chaotic mapping to enhance initial population diversity, a cosine-based nonlinear convergence factor to balance exploration and exploitation, and a hybrid strategy inspired by the dung beetle optimizer to mitigate stagnation in local optima. When evaluated on the CEC2017 benchmark suite, DBO-AWOA demonstrates superior convergence precision and robustness, achieving the lowest minimum and average values across 72% of test functions. In 3D path-planning simulations within mountainous environments, DBO-AWOA generates smoother, shorter, and safer trajectories compared to existing variants, with fitness values reduced by 5-25%. Although the algorithm demonstrates slight instability in highly dynamic hybrid functions, its overall performance marks an improvement in global optimization and UAV path planning.
Keywords: DBO-AWOA; UAV; adaptive inertia mechanisms; chaotic mapping; dung beetle optimizer; nonlinear convergence factors; path planning.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures
Similar articles
-
Multi-strategy hybrid adaptive dung beetle optimization for UAV photogrammetric 3D path planning under complex constraints.Sci Rep. 2025 Apr 29;15(1):15088. doi: 10.1038/s41598-025-98563-2. Sci Rep. 2025. PMID: 40301589 Free PMC article.
-
Multi-strategy cooperative enhancement dung beetle optimizer and its application in obstacle avoidance navigation.Sci Rep. 2024 Nov 14;14(1):28041. doi: 10.1038/s41598-024-79420-0. Sci Rep. 2024. PMID: 39543289 Free PMC article.
-
An Adaptive Spiral Strategy Dung Beetle Optimization Algorithm: Research and Applications.Biomimetics (Basel). 2024 Aug 29;9(9):519. doi: 10.3390/biomimetics9090519. Biomimetics (Basel). 2024. PMID: 39329541 Free PMC article.
-
Bio-Inspired Optimization-Based Path Planning Algorithms in Unmanned Aerial Vehicles: A Survey.Sensors (Basel). 2023 Mar 12;23(6):3051. doi: 10.3390/s23063051. Sensors (Basel). 2023. PMID: 36991762 Free PMC article. Review.
-
Advances in Zeroing Neural Networks: Bio-Inspired Structures, Performance Enhancements, and Applications.Biomimetics (Basel). 2025 Apr 29;10(5):279. doi: 10.3390/biomimetics10050279. Biomimetics (Basel). 2025. PMID: 40422109 Free PMC article. Review.
References
-
- Du P., Shi Y., Cao H., Garg S., Alrashoud M., Shukla P.K. AI-Enabled Trajectory Optimization of Logistics UAVs With Wind Impacts in Smart Cities. IEEE Trans. Consum. Electron. 2024;70:3885–3897. doi: 10.1109/TCE.2024.3355061. - DOI
-
- Perz R., Wronowski K. UAV Application for Precision Agriculture. Aircr. Eng. Aerosp. Technol. 2018;91:257–263. doi: 10.1108/AEAT-01-2018-0056. - DOI
-
- Zhou T., Zhang J., Shi J., Liu Z., Huang J. Multidepot UAV Routing Problem with Weapon Configuration and Time Window. J. Adv. Transp. 2018;2018:7318207. doi: 10.1155/2018/7318207. - DOI
-
- Liu Y., Zhang X., Guan X., Delahaye D. Adaptive Sensitivity Decision Based Path Planning Algorithm for Unmanned Aerial Vehicle with Improved Particle Swarm Optimization. Aerosp. Sci. Technol. 2016;58:92–102. doi: 10.1016/j.ast.2016.08.017. - DOI
-
- Hart P.E., Nilsson N.J., Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968;4:100–107. doi: 10.1109/TSSC.1968.300136. - DOI
LinkOut - more resources
Full Text Sources
