

An integrated multi criteria decision making method using dual hesitant fuzzy sets with application for unmanned aerial vehicle selection
- PMID: 40221449
- PMCID: PMC11993664
- DOI: 10.1038/s41598-025-95981-0
An integrated multi criteria decision making method using dual hesitant fuzzy sets with application for unmanned aerial vehicle selection
Abstract
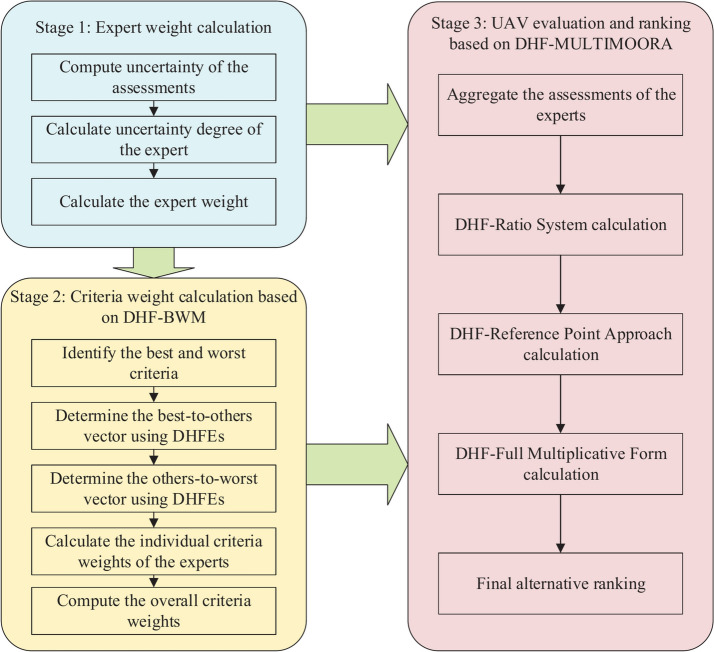
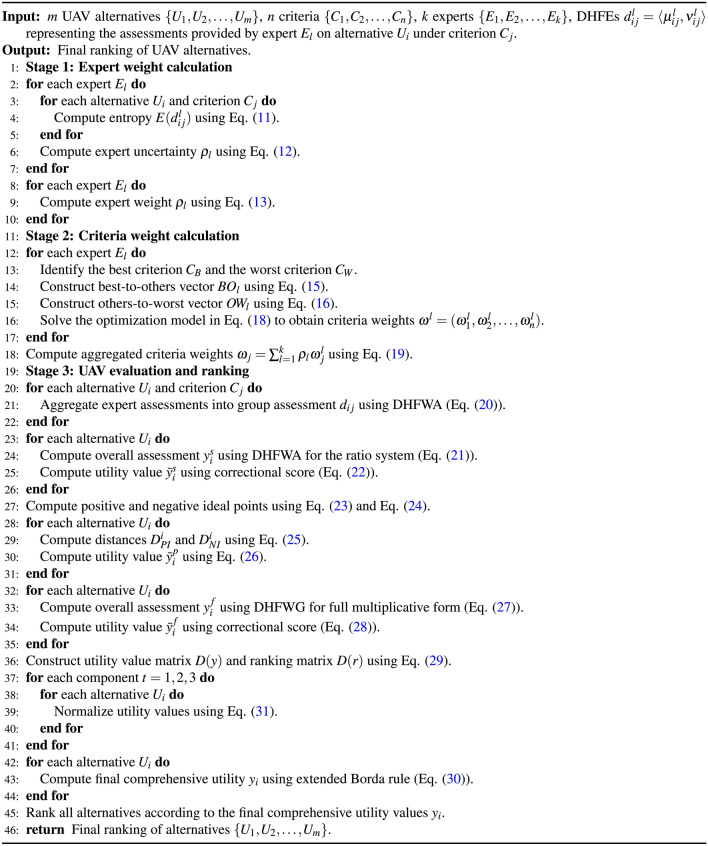
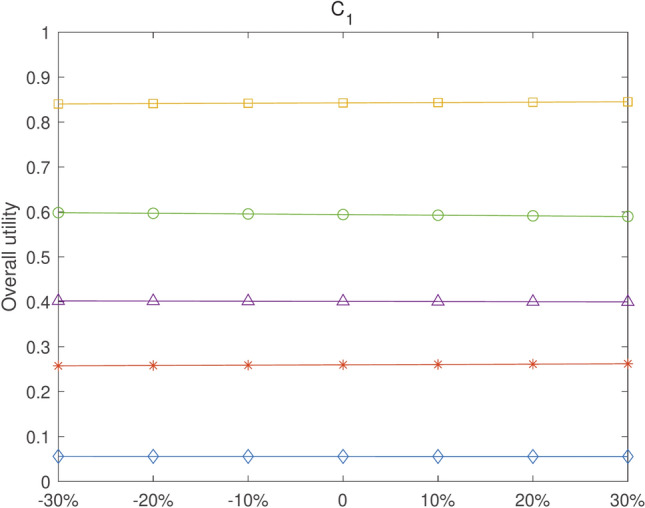
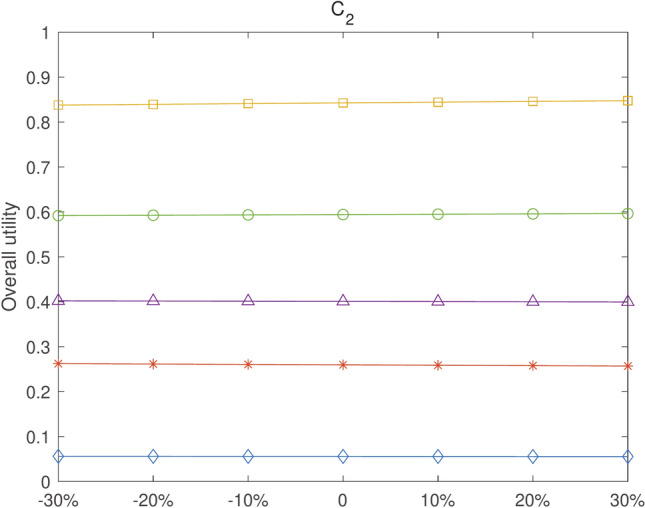
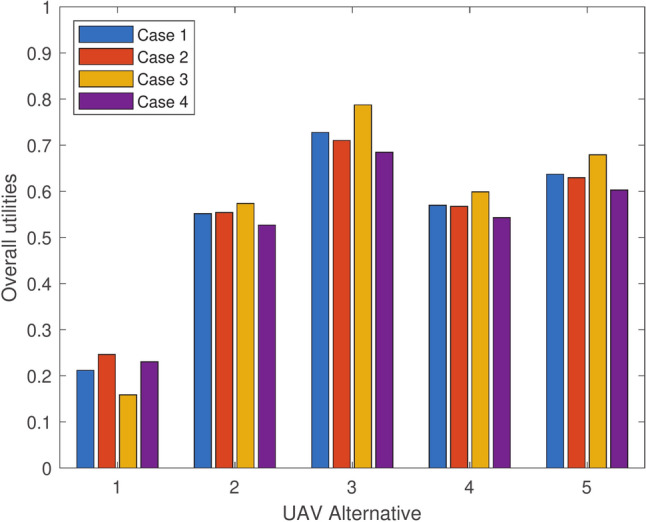
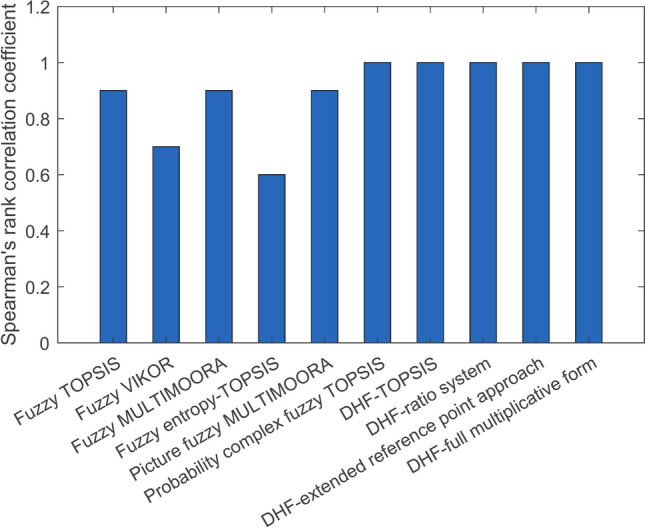
Unmanned aerial vehicles (UAVs) have gained widespread attention in recent years due to their expanding applications across various industrial sectors. Selecting the most suitable UAV for a given task is a critical decision-making challenge, which is typically modeled as a multi-criteria decision-making (MCDM) problem. However, expert assessments in such selection processes often involve considerable uncertainty and hesitation. To address this, this paper proposes a novel integrated MCDM framework that combines dual hesitant fuzzy sets (DHFSs), the best-worst method (BWM), and the MULTIMOORA method to evaluate and rank UAV alternatives. In the proposed method, DHFSs are employed to capture both membership and non-membership degrees of expert assessments under uncertainty, while expert weights are objectively determined based on the entropy of their assessments. Criteria weights are then calculated using an extended dual hesitant fuzzy BWM. Subsequently, the MULTIMOORA method is extended into the dual hesitant fuzzy environment, where UAV alternatives are evaluated from three perspectives: the ratio system, the extended reference point approach, and the full multiplicative form, and the evaluation results are aggregated to generate a comprehensive and reliable final ranking. To demonstrate the practicality and effectiveness of the proposed method, a case study on UAV selection for power line inspection is presented. The results show that the proposed approach effectively handles uncertainty, produces stable and consistent rankings, and offers reliable decision support under uncertain and fuzzy conditions. The proposed method provides a flexible and systematic decision-making tool that can assist decision-makers in solving UAV selection problems in complex, real-world scenarios.
Keywords: Dual hesitant fuzzy sets; MULTIMOORA; Multi criteria decision making; Unmanned aerial vehicle.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures
Similar articles
-
An extension of the best-worst method based on the spherical fuzzy sets for multi-criteria decision-making.Granul Comput. 2024;9(2):40. doi: 10.1007/s41066-024-00462-w. Epub 2024 Mar 30. Granul Comput. 2024. PMID: 38585422 Free PMC article.
-
An integrated multi-criteria decision making approach with linguistic hesitant fuzzy sets for E-learning website evaluation and selection.Appl Soft Comput. 2021 Apr;102:107118. doi: 10.1016/j.asoc.2021.107118. Epub 2021 Jan 20. Appl Soft Comput. 2021. PMID: 36570416 Free PMC article.
-
The q-rung fuzzy LOPCOW-VIKOR model to assess the role of unmanned aerial vehicles for precision agriculture realization in the Agri-Food 4.0 era.Artif Intell Rev. 2023 Apr 11:1-34. doi: 10.1007/s10462-023-10476-6. Online ahead of print. Artif Intell Rev. 2023. PMID: 37362884 Free PMC article.
-
The large-scale group consensus multi-attribute decision-making method based on probabilistic dual hesitant fuzzy sets.Math Biosci Eng. 2024 Feb 22;21(3):3944-3966. doi: 10.3934/mbe.2024175. Math Biosci Eng. 2024. PMID: 38549314
-
An Integrated MCDM Model for Conveyor Equipment Evaluation and Selection in an FMC Based on a Fuzzy AHP and Fuzzy ARAS in the Presence of Vagueness.PLoS One. 2016 Apr 12;11(4):e0153222. doi: 10.1371/journal.pone.0153222. eCollection 2016. PLoS One. 2016. PMID: 27070543 Free PMC article. Review.
Cited by
-
An interval type-2 fuzzy multi-criteria decision-making approach for patient bed allocation.Sci Rep. 2025 Jul 1;15(1):21019. doi: 10.1038/s41598-025-09199-1. Sci Rep. 2025. PMID: 40596627 Free PMC article.
References
-
- Shakhatreh, H. et al. Unmanned aerial vehicles (uavs): A survey on civil applications and key research challenges. IEEE Access7, 48572–48634 (2019).
-
- Valavanis, K. P. Advances in unmanned aerial vehicles: state of the art and the road to autonomy (2008).
-
- Miralles, F. et al. Linedrone technology: Landing an unmanned aerial vehicle on a power line. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (ed. Miralles, F.) 6545–6552 (IEEE, 2018).
-
- Boukoberine, M. N., Zhou, Z. & Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy255, 113823 (2019).
-
- Berie, H. T. & Burud, I. Application of unmanned aerial vehicles in earth resources monitoring: focus on evaluating potentials for forest monitoring in ethiopia. Eur. J. Remote Sens.51, 326–335 (2018).
Grants and funding
LinkOut - more resources
Full Text Sources
