

A robotic rehabilitation intervention in a home setting during the Covid-19 outbreak: a feasibility pilot study in patients with stroke
- PMID: 40269913
- PMCID: PMC12020300
- DOI: 10.1186/s12984-025-01633-9
A robotic rehabilitation intervention in a home setting during the Covid-19 outbreak: a feasibility pilot study in patients with stroke
Abstract
Background: Telerehabilitation allows patients to engage in therapy away from healthcare facilities, often in the comfort of their homes. Studies have suggested that it can effectively improve motor and cognitive function. However, its applicability may be limited to patients with severe impairments who require physical assistance. The proposed study aims to evaluate the feasibility and effects of a home-based rehabilitation program for post-stroke patients, based on the use of a planar robot, able to overcome the limitations posed by the COVID-19 pandemic.
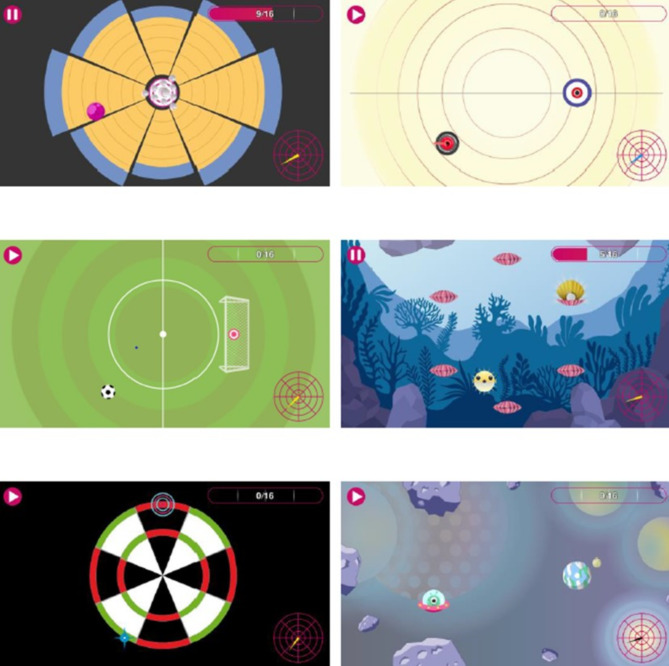
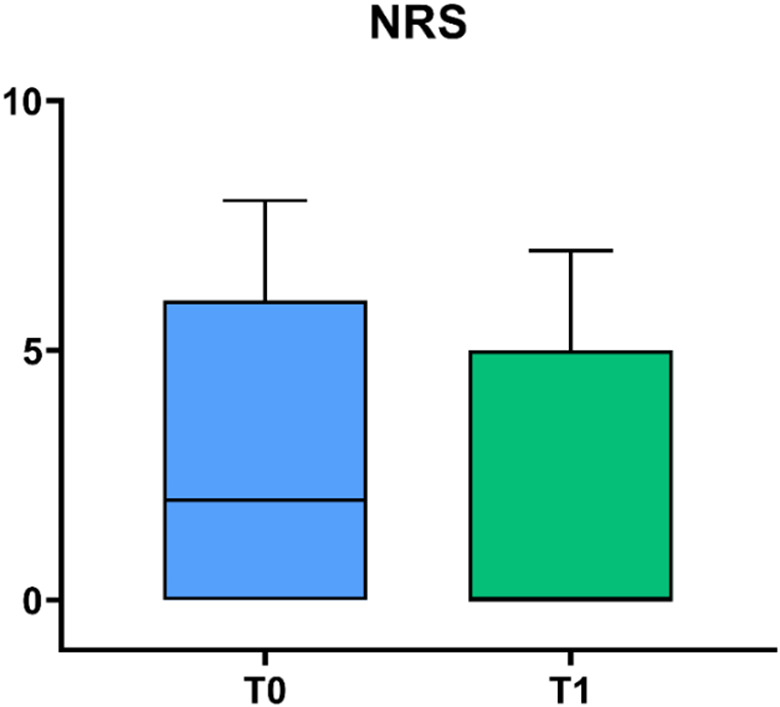
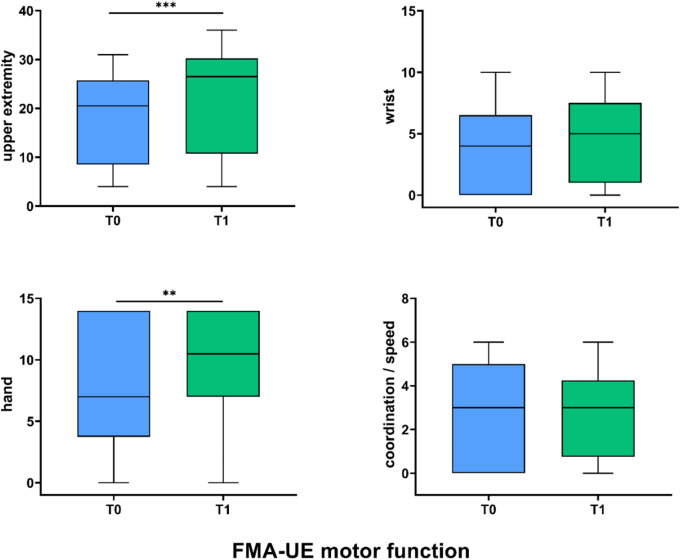
Methods: We enrolled 20 patients with stroke (11 men, aged 66.1 ± 9.2 years). Patients underwent 20 one-hour robotic upper limb rehabilitation sessions, consisting of the execution of planar point-to-point reaching exercises, using a robotic device in their own home, with the remote supervision of a physical therapist. We assessed the feasibility of this intervention by examining adverse events, patient satisfaction (measured on a Likert scale), usability (using the System Usability Scale, SUS), acceptability (evaluated through the Technology Acceptance Model questionnaire, TAM+), and pain onset (measured with the Numeric Rating Scale). To gauge the clinical effects of the treatment, we analyzed changes in the motor and sensory components of the Fugl-Meyer Assessment for Upper Extremity (FMA-UE) before and after the intervention.
Results: The approach was safe, as we did not observe any adverse events, and patients did not experience an increase in pain levels. Patients expressed their appreciation for the treatment, providing an average Likert scale score of 8 out of 10. The usability of the treatment received high marks, with an average SUS score of 78 ± 12. Similarly, the treatment acceptability was favorable, with all examined domains scoring above 4, indicating a positive attitude towards the proposed solution. Moreover, we observed a statistically significant improvement in the motor part of the FMA-UE (p < 0.001).
Conclusion: Our results demonstrate the feasibility, safety, and effectiveness of employing a rehabilitation robot for upper limb rehabilitation in post-stroke patients within a home-based environment. These findings mark a significant step in advancing innovative and easily accessible rehabilitation options for stroke survivors, ensuring uninterrupted care and creating new opportunities to enhance their functional abilities.
Trial registration: clinicaltrial.gov (NCT05250934).
Keywords: Covid-19; Rehabilitation; Robotics; Stroke; Telerehabilitation; Upper extremity.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Ethics approval and consent to participate: The study was approved by the Ethics Committee “Comitato Etico Lazio 1” on May 6, 2021 (610/CE Lazio 1). All recruited participants provided written, informed consent to participate in this study. Consent for publication: Not applicable. Competing interests: The authors declare no competing interests.
Figures






References
-
- Katan M, Luft A. Global burden of stroke. Semin Neurol. 2018;38:208–11. - PubMed
-
- Stinear CM, Lang CE, Zeiler S, Byblow WD. Advances and challenges in stroke rehabilitation. Lancet Neurol. 2020;19:348–60. - PubMed
-
- Kwakkel G, Kollen BJ, van der Grond J, Prevo AJH. Probability of regaining dexterity in the flaccid upper limb: impact of severity of paresis and time since onset in acute stroke. Stroke. 2003;34:2181–6. - PubMed
-
- Gowland C. Recovery of motor function following stroke: profile and predictors. Physiotherapy Can. 1982;34:77–84.
-
- Kwakkel G, Wagenaar RC, Kollen BJ, Lankhorst GJ. Predicting disability in stroke–a critical review of the literature. Age Ageing. 1996;25:479–89. - PubMed
Publication types
MeSH terms
Associated data
Grants and funding
- F84E21000080006/Co-funded by the European Union through Lazio Innova
- F84E21000080006/Co-funded by the European Union through Lazio Innova
- F84E21000080006/Co-funded by the European Union through Lazio Innova
- F84E21000080006/Co-funded by the European Union through Lazio Innova
- F84E21000080006/Co-funded by the European Union through Lazio Innova
LinkOut - more resources
Full Text Sources
Medical
