

Bridging the gap between haptic devices and cobots with highly geared magnetorheological actuators
- PMID: 40274945
- PMCID: PMC12022086
- DOI: 10.1038/s41598-025-98999-6
Bridging the gap between haptic devices and cobots with highly geared magnetorheological actuators
Abstract
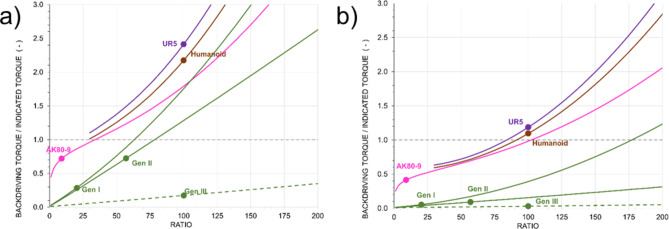
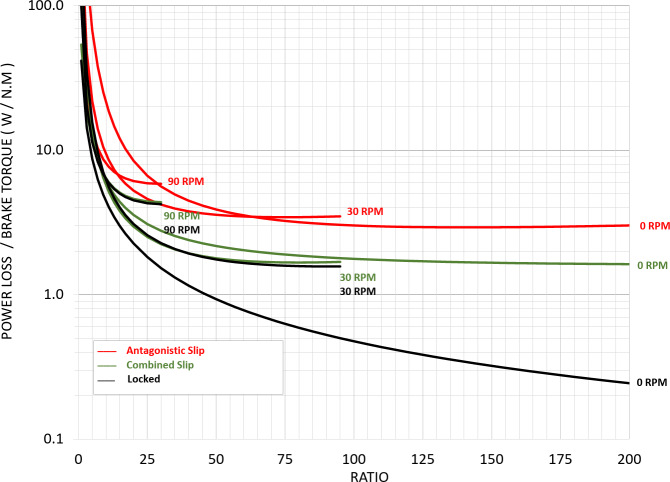
In the current age of artificial intelligence, physical interactions between humans and robots have become a crucial aspect of robot design. However, these interactions are limited by the performance of actuation hardware. Unlike human muscles, robot actuators cannot handle both strong, powerful tasks (such as typical cobot tasks) and delicate, dexterous tasks (such as haptic tasks) with the same efficiency and size due to conflicting design requirements. As a result, different actuation methods are chosen based on how much emphasis is placed on a specific set of performance criteria. To address these conflicting demands, this paper investigates the potential of using magnetorheological (MR) clutch actuators for more human-like robot interactions. The paper presents an analytical and experimental comparison of today's leading actuator technologies-high reduction ratio's harmonic drives and low reductions ratio's quasi-direct drives-against MR clutch actuators. Analytical models are developed to evaluate five key actuator performance metrics: torque-to-mass, torque-to-inertia, backdriving loads, rendering stiffness, and power consumption. The design space for the three technologies is explored, and their performance potential is analyzed. The results demonstrate that the fluidic interface of MR actuators resolves two major conflicts. First, it overcomes the fundamental conflict in gearing selection by separating the motor's inertia from the actuator's output, allowing for high gearing ratios (such as 100:1) to minimize actuator torque-density with minimal output inertia. Second, MR actuators address the issue of damping, which limits quasi-direct drive stiffness rendering, by using the serial positioning of the fluidic interface to adjust damping rates as needed, enabling rendered stiffness levels up to five times greater than harmonic drives. These dynamic characteristics, combined with high torque densities (> 100 Nm/kg), low backdriving torque, and low power consumption, offer the potential for robotic performance that closely mimics human capabilities.
Keywords: Actuators; Collaborative robots; Design; Haptic robots; Humanoid robots; Magnetorheological fluids; Modeling; Performance metrics.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: Pr. Jean-Sebastien Plante is the Chief Technology Officer of Exonetik Inc. and Professor of mechanical engineering at the Université de Sherbrooke.Alexandre St-Jean received student grants from Mitacs for internships that were partially funded by Exonetik Inc to perform the work described in this paper. He is also employed by Exonetik Inc.Dr. Jean-Philippe Lucking Bigué is the Lead Robotic Engineer at Exonetik Inc.
Figures















References
-
- Robla-Gómez, S. et al. Working together: A review on safe Human-Robot collaboration in industrial environments. IEEE Access.5, 26754–26773 (2017).
-
- Phantom Premium Haptic Devices. (2016). https://www.3dsystems.com/haptics-devices/3d-systems-phantom-premium
-
- HAPTION. HAPTIONhttps://www.haption.com
-
- WAM® Arm. Barrett Technologyhttps://advanced.barrett.com/wam-arm-1
-
- Home Boston Dynamics https://bostondynamics.com/.
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
