

Adaptive Distributed Student's T Extended Kalman Filter Employing Allan Variance for UWB Localization
- PMID: 40293060
- PMCID: PMC11946433
- DOI: 10.3390/s25061883
Adaptive Distributed Student's T Extended Kalman Filter Employing Allan Variance for UWB Localization
Abstract
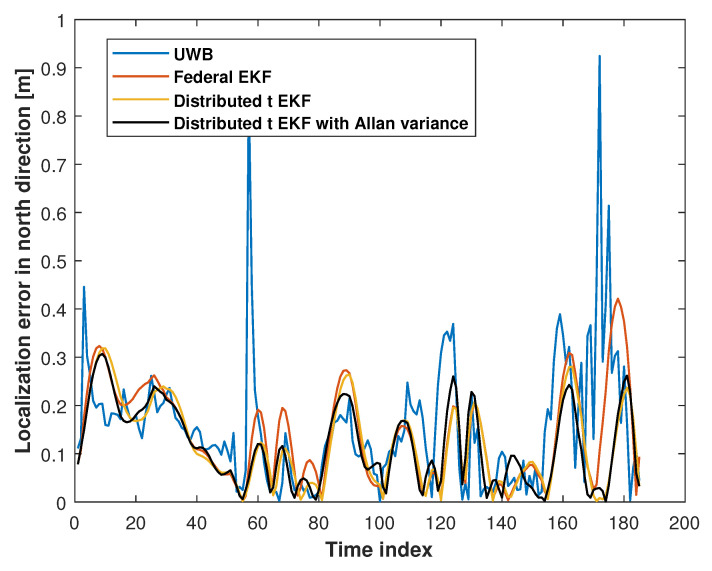
This study proposes an adaptive distributed Student's t extended Kalman filter (EKF) using Allan variance for ultrawide-band (UWB) localization. First of all, we model the state equation using the target's position and velocity in east and north directions and the measurement equation by using distance between the UWB base station (BS) and the target object. Then, the adaptive distributed filter employs a federation structure: A local t EKF is designed to estimate the target's position by fusing the distance between the UWB base station and the target object. The main filter fuses the local filter's outputs and computes the final output. For the local t EKF, in order to overcome the problem that noise in the Kalman method is assumed to be white noise and difficult to adapt to practical application environments, the t distribution is used to model noise. Meanwhile, Allan variance is calculated to assist the local filter, which improves the adaptive ability. Experimental results show that the proposed method effectively enhances navigation accuracy compared to the distributed EKF.
Keywords: UWB; extended Kalman filter; t distribution.
Conflict of interest statement
Authors Yanli Gao and Yuan Xu were employed by Shandong Huichuang Information Technology Co., Ltd. Authors Maosheng Yang, Xin Zang and Yuan Xu were employed by Jinan Chenhe Information Technology Co., Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures












References
-
- Luo R., Lai C. Enriched Indoor Map Construction Based on Multisensor Fusion Approach for Intelligent Service Robot. IEEE Trans. Ind. Electron. 2012;59:3135–3145. doi: 10.1109/TIE.2011.2141090. - DOI
-
- Xu Y., Wan D., Bi S., Guo H., Zhuang Y. A FIR filter assisted with the predictive model and ELM integrated for UWB-based quadrotor aircraft localization. Satell. Navig. 2023;4:2. doi: 10.1186/s43020-022-00091-1. - DOI
-
- He Z., Chen W., Yang Y., Weng D., Cao N. Maritime Ship Target Imaging with GNSS-Based Passive Multistatic Radar. IEEE Trans. Geosci. Remote Sens. 2023;61:1–18. doi: 10.1109/TGRS.2023.3270182. - DOI
-
- Cheng J., Liu W., Zhang X., Wang F., Li Z., Tang C., Pan J., Chang Z. On-board validation of BDS-3 autonomous navigation using inter-satellite link observations. J. Geod. 2023;7:71. doi: 10.1007/s00190-023-01759-5. - DOI
-
- Gong X., Zhang W., Wang Q., Wang F., Li X., Sang J., Liu W. Precise real-time navigation of the small TJU-1 satellite using GPS, GLONASS and BDS. Measurement. 2022;204:112090. doi: 10.1016/j.measurement.2022.112090. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
