

Heuristic pruning of decision trees at low probabilities and probability discounting in sequential planning in young and older adults
- PMID: 40346145
- PMCID: PMC12064811
- DOI: 10.1038/s41598-025-00905-7
Heuristic pruning of decision trees at low probabilities and probability discounting in sequential planning in young and older adults
Abstract
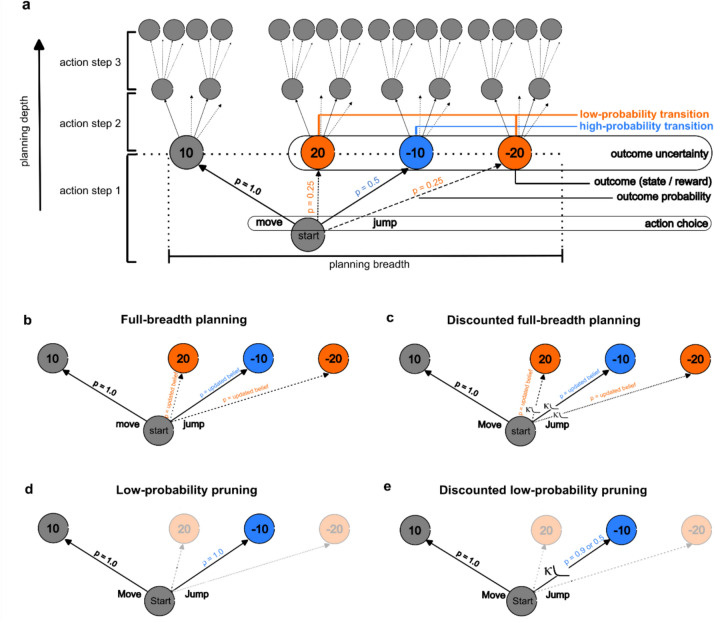
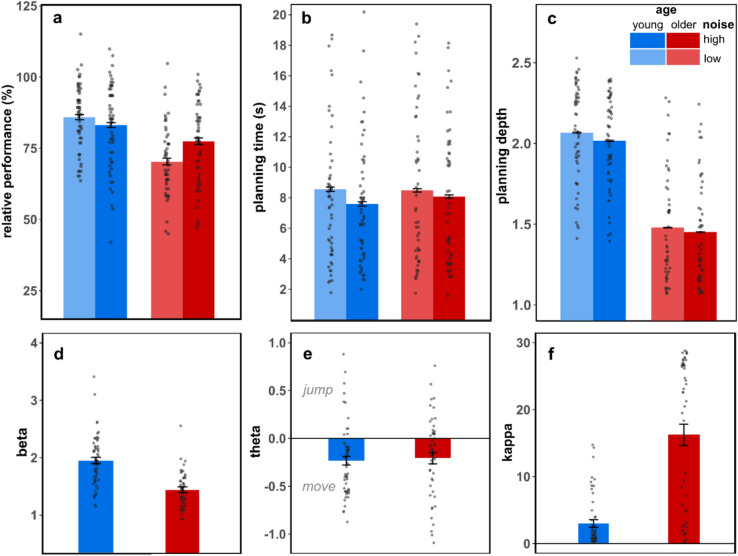
When planning an action sequence, it has been shown that humans prune decision trees to reduce computational complexity, instead of considering all possible options. However, little is understood about pruning employed in probabilistic environments, where actions result in multiple outcomes with varying probabilities, and how decision biases, such as discounting of probabilistic rewards, influence decisions. This study investigates whether participants prune low-probability options in a three-step decision-making task and analyzes the impact of probability discounting on planning. Potential age-related differences in planning strategies are explored in groups of young (aged 18-35 years; n = 57) and older (aged 65-75 years; n = 50) adults. By using reinforcement-learning modeling and model comparison, we show that participants reduce computational demands by pruning decision tree branches of lower probability-a highly efficient strategy in this environment. Additionally, participants reduce their planning depth, i.e., the number of considered steps. Planning is further influenced by discounting high-probability outcomes. Older individuals show stronger reductions in planning depth, an increase in decision noise, and more pronounced probability discounting, which contributes to the observed age-related decline in planning performance. Our findings suggest directions for future research to elucidate the underlying meta-control mechanisms guiding the application of planning strategies.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures



References
-
- Sutton, R. S. & Barto, A. G. Reinforcement Learning: An Introduction (The MIT Press, 2018).
-
- Callaway, F., Lieder, F., Krueger, P. & Griffiths, T. L. Mouselab-MDP: A new paradigm for tracing how people plan. (2017).
MeSH terms
LinkOut - more resources
Full Text Sources
