

The Variable Stiffness Treadmill 2: Development and Validation of a Unique Tool to Investigate Locomotion on Compliant Terrains
- PMID: 40365138
- PMCID: PMC12074642
- DOI: 10.1115/1.4066173
The Variable Stiffness Treadmill 2: Development and Validation of a Unique Tool to Investigate Locomotion on Compliant Terrains
Abstract
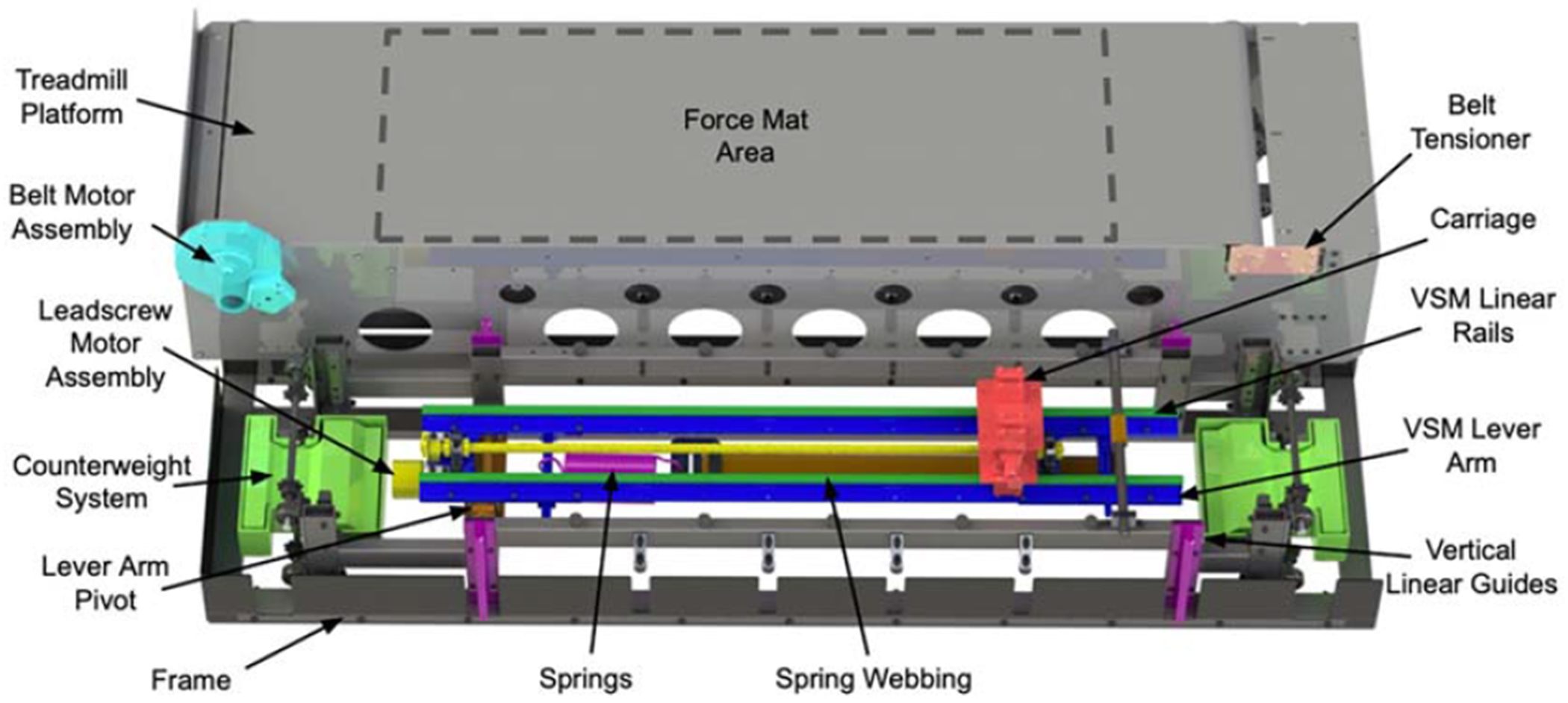
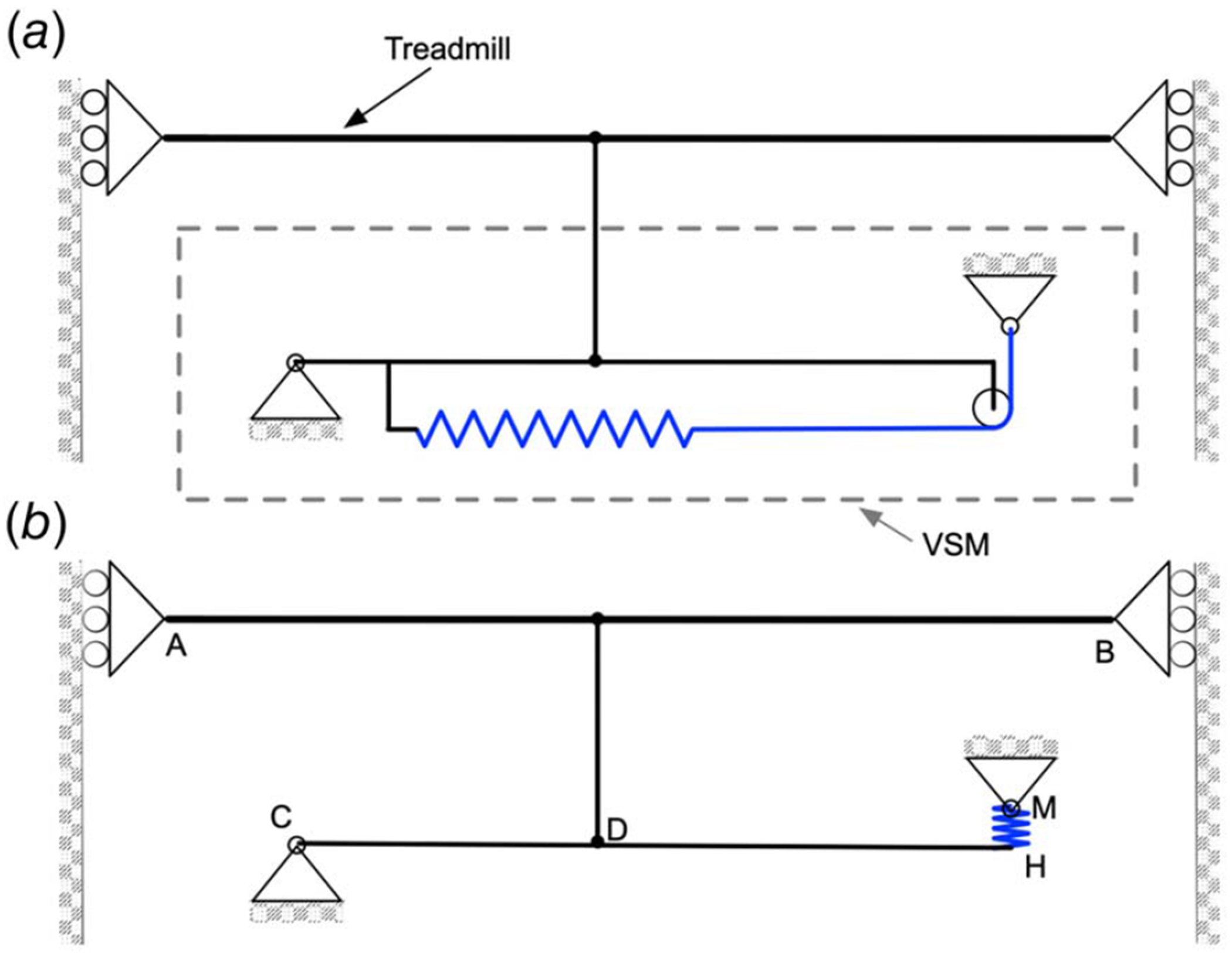
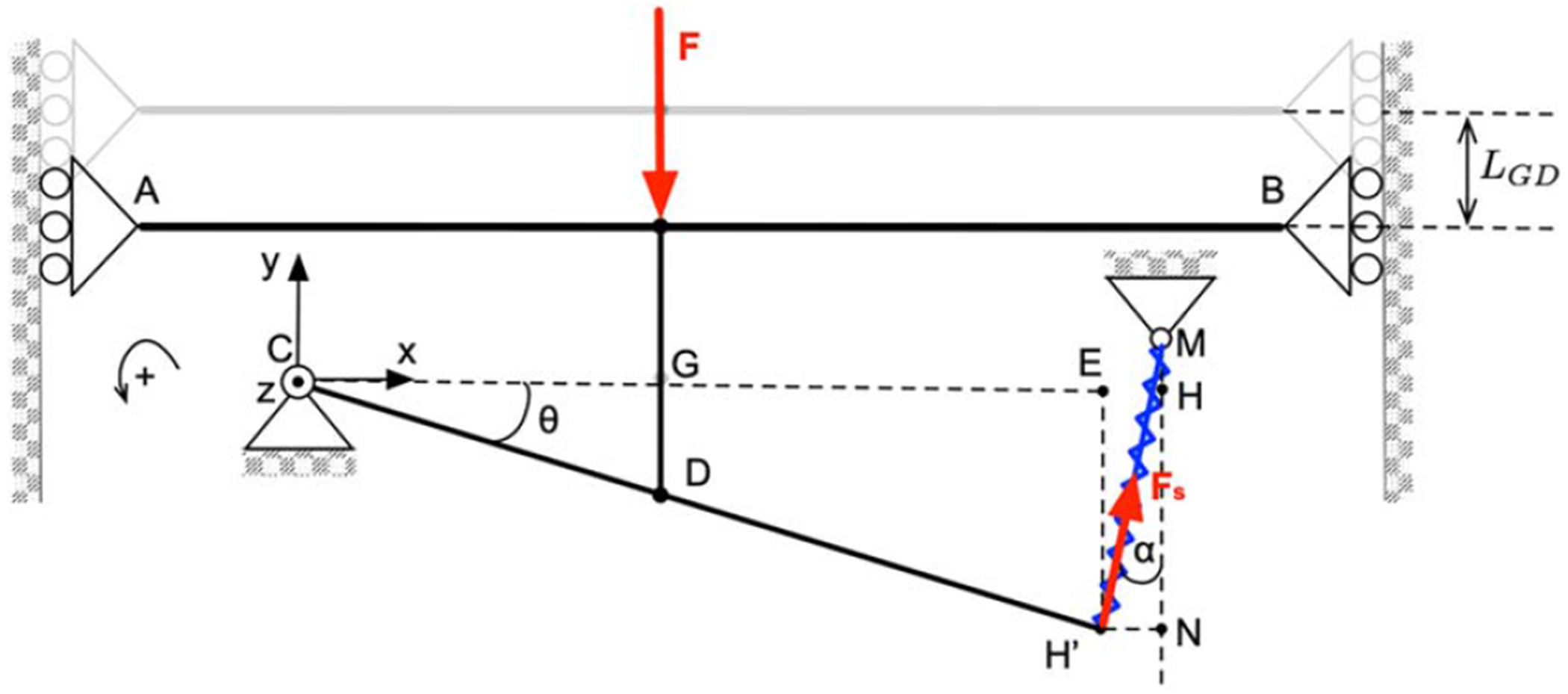
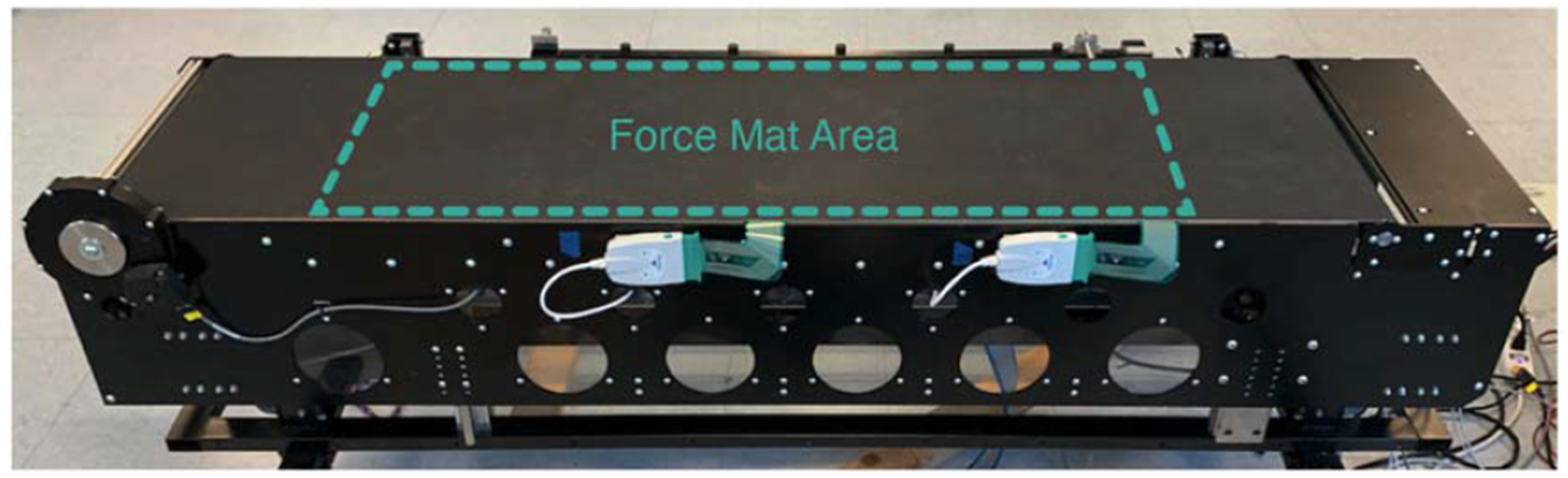
Understanding legged locomotion in various environments is valuable for many fields, including robotics, biomechanics, rehabilitation, and motor control. Specifically, investigating legged locomotion in compliant terrains has recently been gaining interest for the robust control of legged robots over natural environments. At the same time, the importance of ground compliance has also been highlighted in poststroke gait rehabilitation. Currently, there are not many ways to investigate walking surfaces of varying stiffness. This article introduces the variable stiffness treadmill (VST) 2, an improvement of the first version of the VST, which was the first treadmill able to vary belt stiffness. In contrast to the VST 1, the device presented in this paper (VST 2) can reduce the stiffness of both belts independently, by generating vertical deflection instead of angular, while increasing the walking surface area from 0.20 m2 to 0.74 m2. In addition, both treadmill belts are now driven independently, while high-spatial-resolution force sensors under each belt allow for measurement of ground reaction forces and center of pressure. Through validation experiments, the VST 2 displays high accuracy and precision. The VST 2 has a stiffness range of 13 kN/m to 1.5MN/m, error of less than 1%, and standard deviations of less than 2.2 kN/m, demonstrating its ability to simulate low-stiffness environments reliably. The VST 2 constitutes a drastic improvement of the VST platform, a one-of-its-kind system that can improve our understanding of human and robotic gait while creating new avenues of research on biped locomotion, athletic training, and rehabilitation of gait after injury or disease.
Keywords: biped locomotion; gait; mechanisms and robots; rehabilitation; variable stiffness.
Conflict of interest statement
Conflict of Interest There are no conflicts of interest.
Figures

Similar articles
-
Kinematics, kinetics, and muscle activations during human locomotion over compliant terrains.Sci Data. 2025 Jan 16;12(1):84. doi: 10.1038/s41597-025-04433-x. Sci Data. 2025. PMID: 39819980 Free PMC article.
-
ROBOT-ASSISTED TARGETED GAIT TRAINING.J Kinesiol Exerc Sci. 2024 Feb 22;34(105):11-22. doi: 10.5604/01.3001.0053.9679. Epub 2023 Oct 26. J Kinesiol Exerc Sci. 2024. PMID: 38770104 Free PMC article.
-
Using robot-assisted stiffness perturbations to evoke aftereffects useful to post-stroke gait rehabilitation.Front Robot AI. 2023 Jan 4;9:1073746. doi: 10.3389/frobt.2022.1073746. eCollection 2022. Front Robot AI. 2023. PMID: 36686210 Free PMC article.
-
Legged locomotion over irregular terrains: state of the art of human and robot performance.Bioinspir Biomim. 2022 Oct 13;17(6). doi: 10.1088/1748-3190/ac92b3. Bioinspir Biomim. 2022. PMID: 36113448 Review.
-
Recent Advances in Bipedal Walking Robots: Review of Gait, Drive, Sensors and Control Systems.Sensors (Basel). 2022 Jun 12;22(12):4440. doi: 10.3390/s22124440. Sensors (Basel). 2022. PMID: 35746222 Free PMC article. Review.
References
-
- Reisman DS, Block HJ, and Bastian AJ, 2005, “Interlimb Coordination During Locomotion: What Can Be Adapted and Stored?,” J. Neurophysiol, 94(4), pp. 2403–2415. - PubMed
-
- Sousa ASP, and Tavares JMRS, 2015, “Interlimb Coordination During Step-to-Step Transition and Gait Performance,” J. Motor Behav, 47(6), pp. 563–574. - PubMed
-
- Skidmore J, and Artemiadis P, 2016, “Unilateral Walking Surface Stiffness Perturbations Evoke Brain Responses: Toward Bilaterally Informed Robot-Assisted Gait Rehabilitation,” Proceedings - IEEE International Conference on Robotics and Automation, Stockholm, Sweden, May 16–21, IEEE, pp. 3698–3703.
Grants and funding
LinkOut - more resources
Full Text Sources