

Sensorimotor delays constrain robust locomotion in a 3D kinematic model of fly walking
- PMID: 40372779
- PMCID: PMC12081000
- DOI: 10.7554/eLife.99005
Sensorimotor delays constrain robust locomotion in a 3D kinematic model of fly walking
Abstract
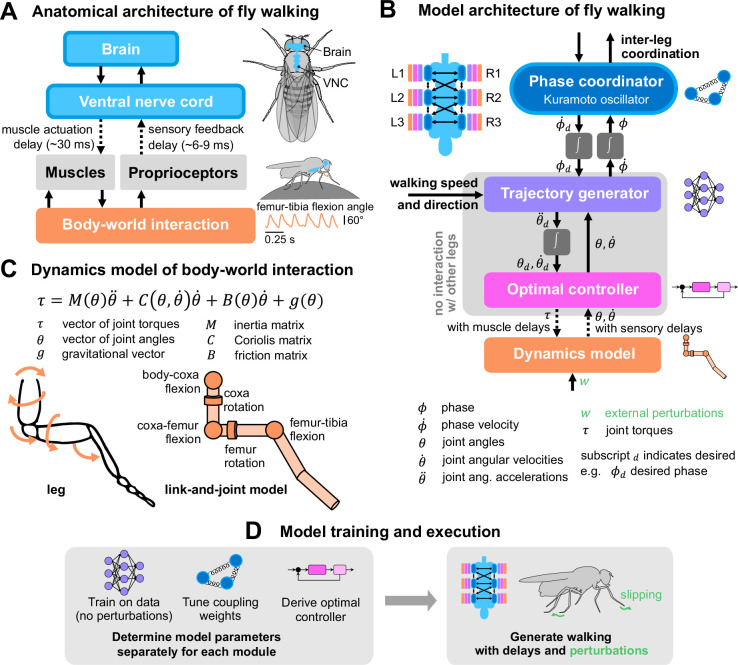
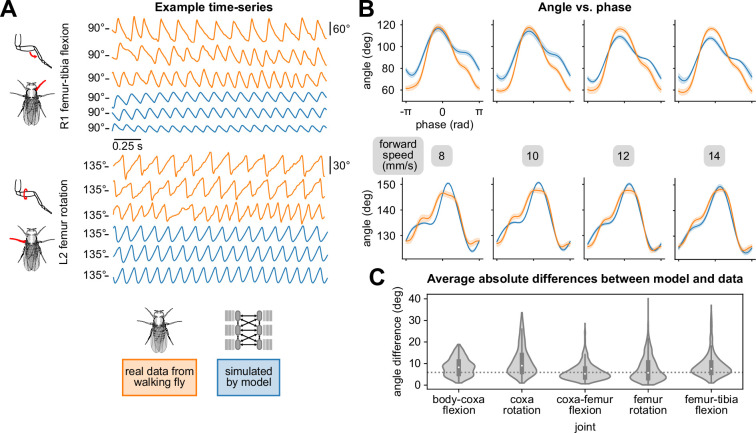
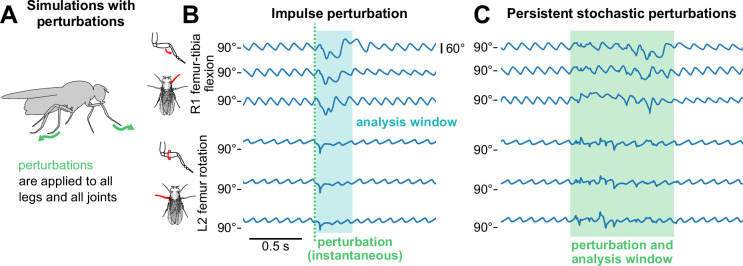
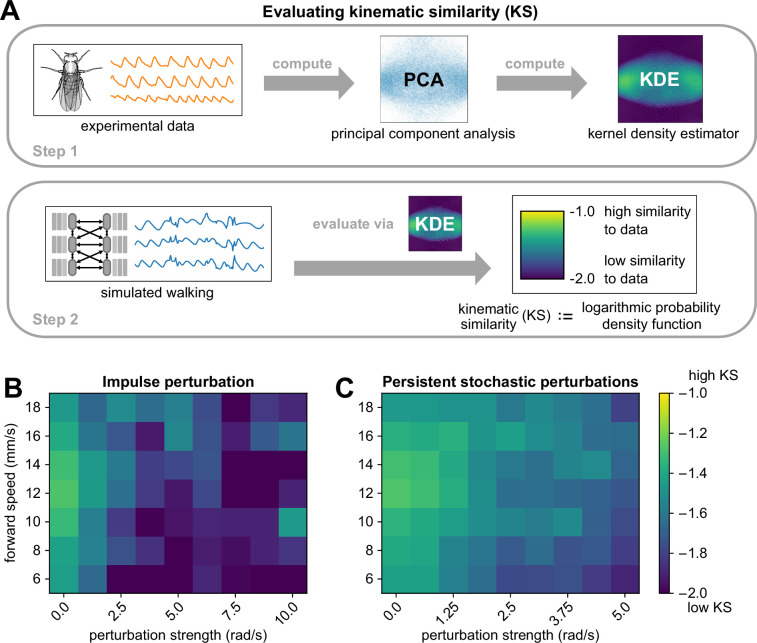
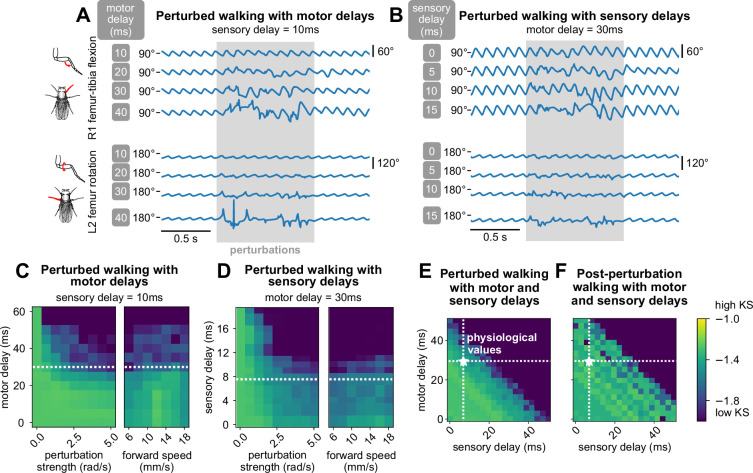
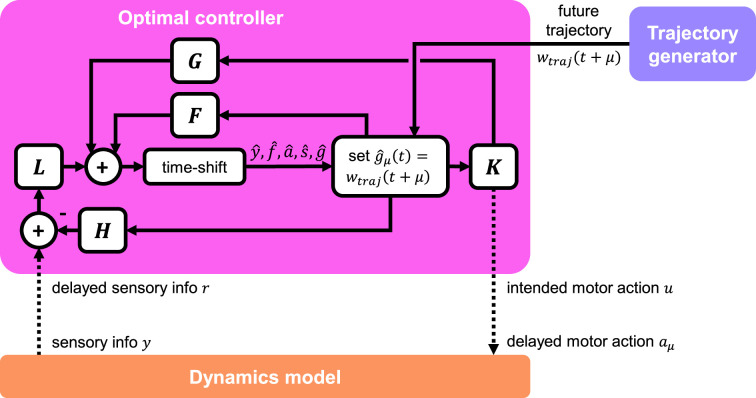
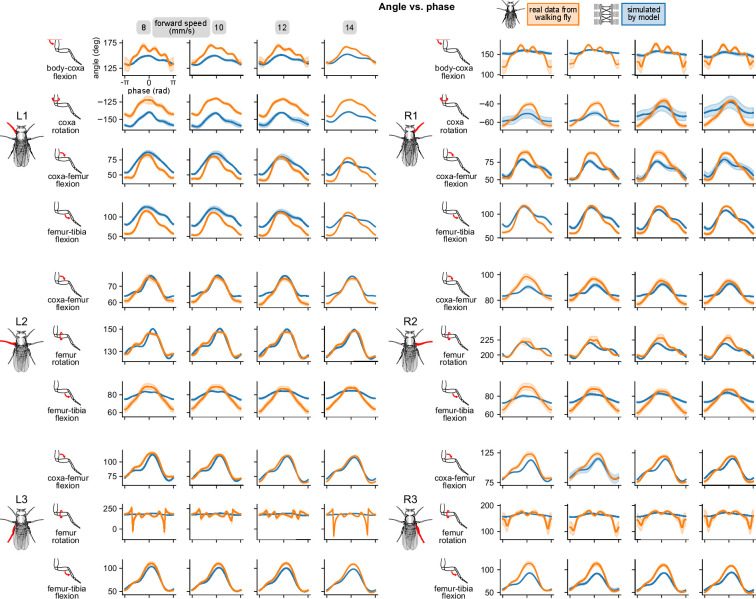
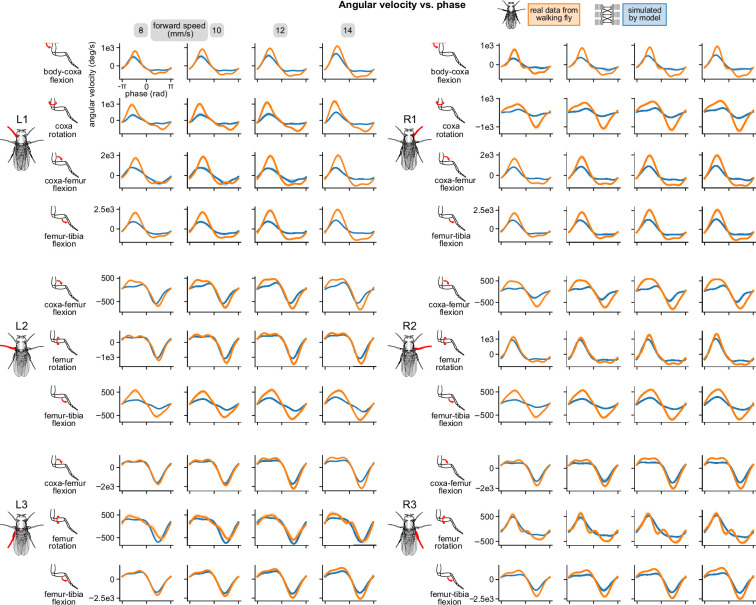
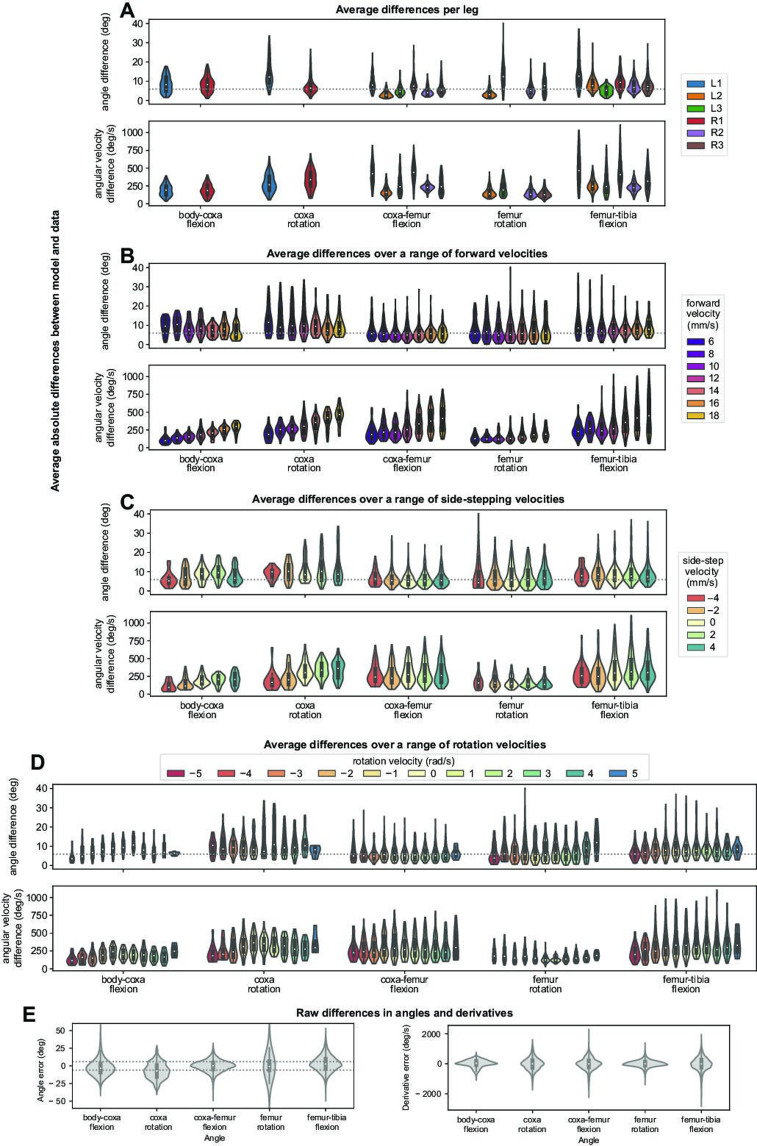
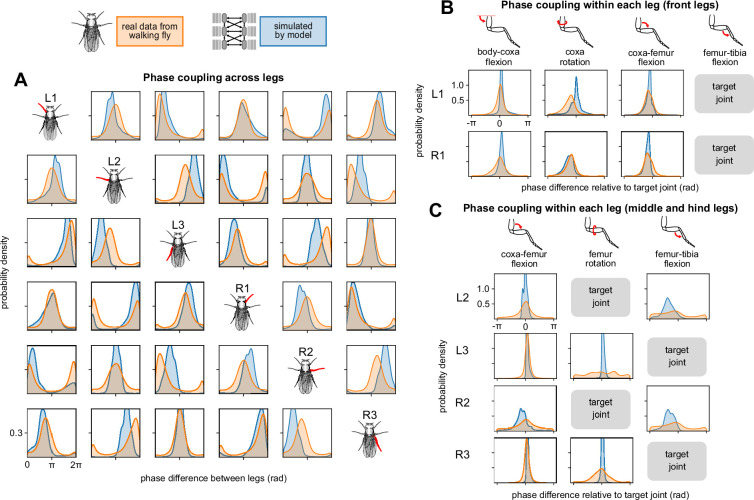
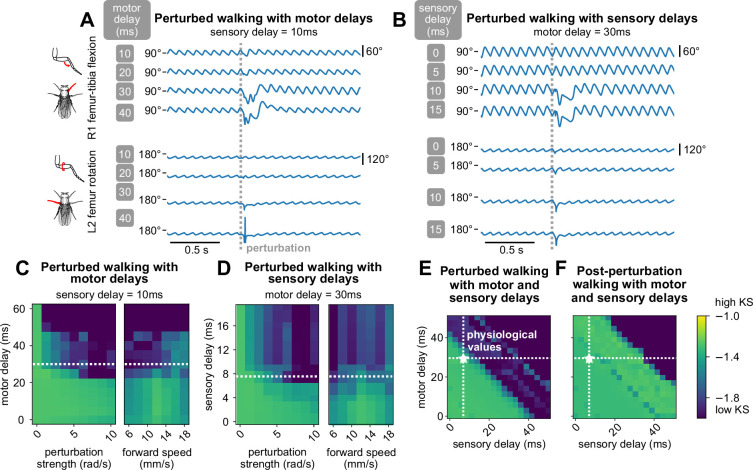
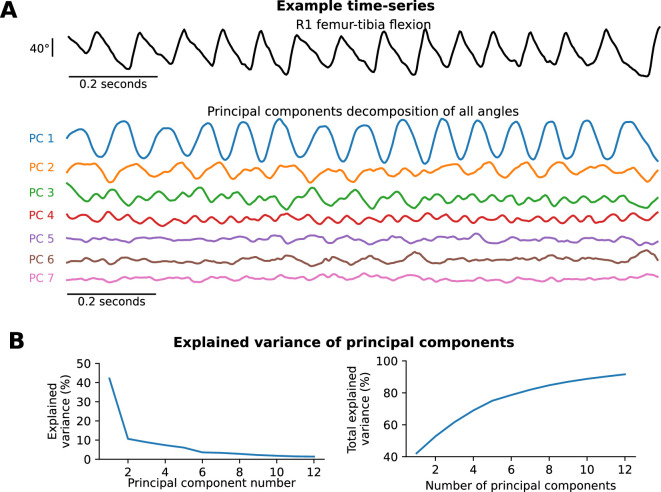
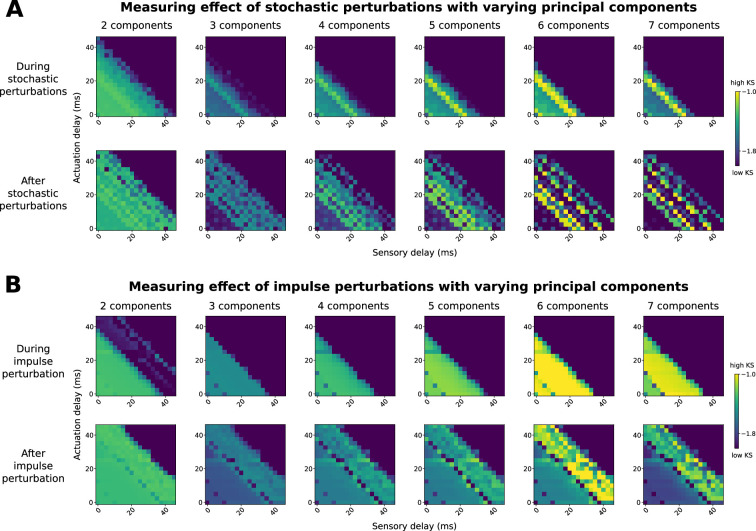
Walking animals must maintain stability in the presence of external perturbations, despite significant temporal delays in neural signaling and muscle actuation. Here, we develop a 3D kinematic model with a layered control architecture to investigate how sensorimotor delays constrain the robustness of walking behavior in the fruit fly, Drosophila. Motivated by the anatomical architecture of insect locomotor control circuits, our model consists of three component layers: a neural network that generates realistic 3D joint kinematics for each leg, an optimal controller that executes the joint kinematics while accounting for delays, and an inter-leg coordinator. The model generates realistic simulated walking that resembles real fly walking kinematics and sustains walking even when subjected to unexpected perturbations, generalizing beyond its training data. However, we found that the model's robustness to perturbations deteriorates when sensorimotor delay parameters exceed the physiological range. These results suggest that fly sensorimotor control circuits operate close to the temporal limit at which they can detect and respond to external perturbations. More broadly, we show how a modular, layered model architecture can be used to investigate physiological constraints on animal behavior.
Keywords: D. melanogaster; computational biology; generative model; locomotor control; neuroscience; quantifying behavior; sensorimotor delay; systems biology; walking.
© 2024, Karashchuk, Li et al.
Conflict of interest statement
LK, JL, GC, SW, SB, BB No competing interests declared, JT Reviewing editor, eLife
Figures
Update of
-
Sensorimotor delays constrain robust locomotion in a 3D kinematic model of fly walking.bioRxiv [Preprint]. 2025 Jan 11:2024.04.18.589965. doi: 10.1101/2024.04.18.589965. bioRxiv. 2025. Update in: Elife. 2025 May 15;13:RP99005. doi: 10.7554/eLife.99005. PMID: 38712226 Free PMC article. Updated. Preprint.
References
-
- Abadi M. TensorFlow: large-scale machine learning on heterogeneous distributed systems. arXiv. 2015 https://arxiv.org/abs/1603.04467
-
- Acebrón JA, Bonilla LL, Pérez Vicente CJ, Ritort F, Spigler R. The Kuramoto model: a simple paradigm for synchronization phenomena. Reviews of Modern Physics. 2005;77:137–185. doi: 10.1103/RevModPhys.77.137. - DOI
-
- Aminzare Z, Srivastava V, Holmes P. Gait transitions in a phase oscillator model of an insect central pattern generator. SIAM Journal on Applied Dynamical Systems. 2018;17:626–671. doi: 10.1137/17M1125571. - DOI
-
- Arevalo JC, Garcia E. Impedance control for legged robots: an insight into the concepts involved. IEEE Transactions on Systems, Man, and Cybernetics, Part C Applications and Reviews. 2012;42:1400–1411. doi: 10.1109/TSMCC.2012.2187190. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
