

This is a preprint.
Detection of moving objects using self-motion constraints on optic flow
- PMID: 40463695
- PMCID: PMC12133078
Detection of moving objects using self-motion constraints on optic flow
Abstract
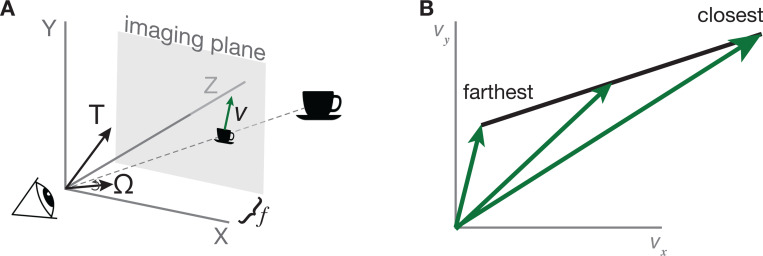
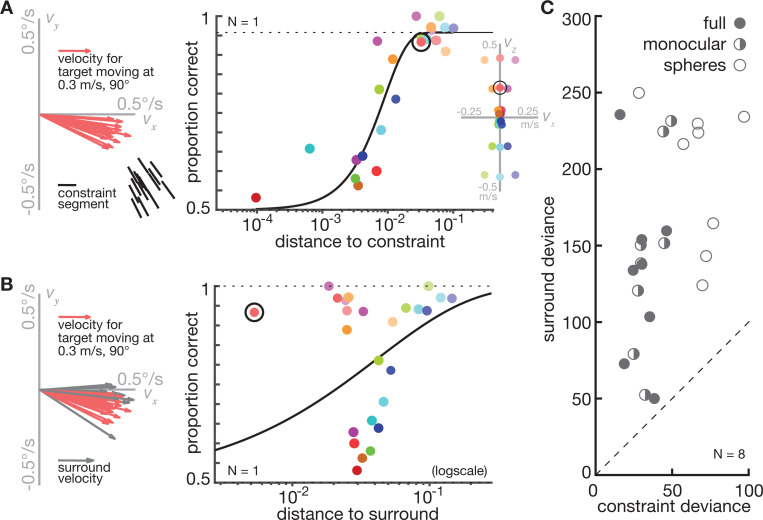
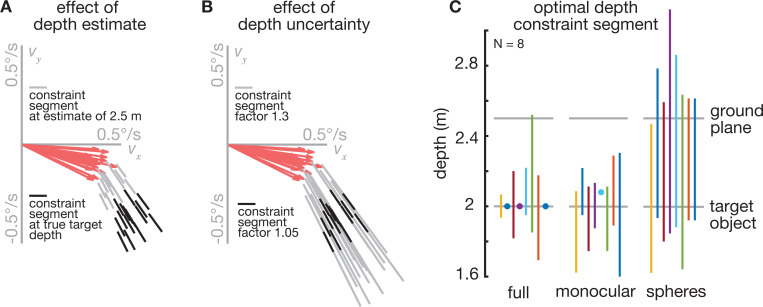
As we move through the world, the pattern of light projected on our eyes is complex and dynamic, yet we are still able to distinguish between moving and stationary objects. We propose that humans accomplish this by exploiting constraints that self-motion imposes on retinal velocities. When an eye translates and rotates in a stationary 3D scene, the velocity at each retinal location is constrained to a line segment in the 2D space of retinal velocities. The slope and intercept of this segment is determined by the eye's translation and rotation, and the position along the segment is determined by local scene depth. Since all possible velocities arising from a stationary scene must lie on this segment, velocities that are not must correspond to objects moving within the scene. We hypothesize that humans make use of these constraints by using deviations of local velocity from these constraint lines to detect moving objects. To test this, we used a virtual reality headset to present rich wide-field stimuli, simulating the visual experience of translating forward in several virtual environments with varied precision of depth information. Participants had to determine if a cued object moved relative to the scene. Consistent with the hypothesis, we found that performance depended on the deviation of the object velocity from the constraint segment, rather than a difference between retinal velocities of the object and its local surround. We also found that the endpoints of the constraint segment reflected the precision of depth information available in the different virtual environments.
Keywords: ego-motion; local motion; moving object detection; optic flow; virtual reality.
Figures



Similar articles
-
Scene-relative object motion biases depth percepts.Sci Rep. 2022 Nov 2;12(1):18480. doi: 10.1038/s41598-022-23219-4. Sci Rep. 2022. PMID: 36323845 Free PMC article.
-
The Primary Role of Flow Processing in the Identification of Scene-Relative Object Movement.J Neurosci. 2018 Feb 14;38(7):1737-1743. doi: 10.1523/JNEUROSCI.3530-16.2017. Epub 2017 Dec 11. J Neurosci. 2018. PMID: 29229707 Free PMC article.
-
The pop out of scene-relative object movement against retinal motion due to self-movement.Cognition. 2007 Oct;105(1):237-45. doi: 10.1016/j.cognition.2006.09.004. Epub 2006 Oct 27. Cognition. 2007. PMID: 17069787
-
Visual processing of the motion of an object in three dimensions for a stationary or a moving observer.Perception. 1995;24(1):87-103. doi: 10.1068/p240087. Perception. 1995. PMID: 7617421 Review.
-
A self-organizing neural network architecture for navigation using optic flow.Neural Comput. 1998 Feb 15;10(2):313-52. doi: 10.1162/089976698300017782. Neural Comput. 1998. PMID: 9472485 Review.
References
-
- Baumann C. and Dierkes K. (2023). Neon accuracy test report. Pupil Labs.
-
- Brainard D. H. (1997). The psychophysics toolbox. Spatial vision, 10(4):433–436. - PubMed
-
- Brenner E. (1991). Judging object motion during smooth pursuit eye movements: The role of optic flow. Vision Research, 31(11):1893–1902. - PubMed
-
- Britten K. H. and van Wezel R. J. (2002). Area MST and heading perception in macaque monkeys. Cerebral Cortex, 12(7):692––701. - PubMed
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials