

Interference Underlies Attenuation upon Relearning in Sensorimotor Adaptation
- PMID: 40473468
- PMCID: PMC12203768
- DOI: 10.1523/ENEURO.0132-25.2025
Interference Underlies Attenuation upon Relearning in Sensorimotor Adaptation
Abstract
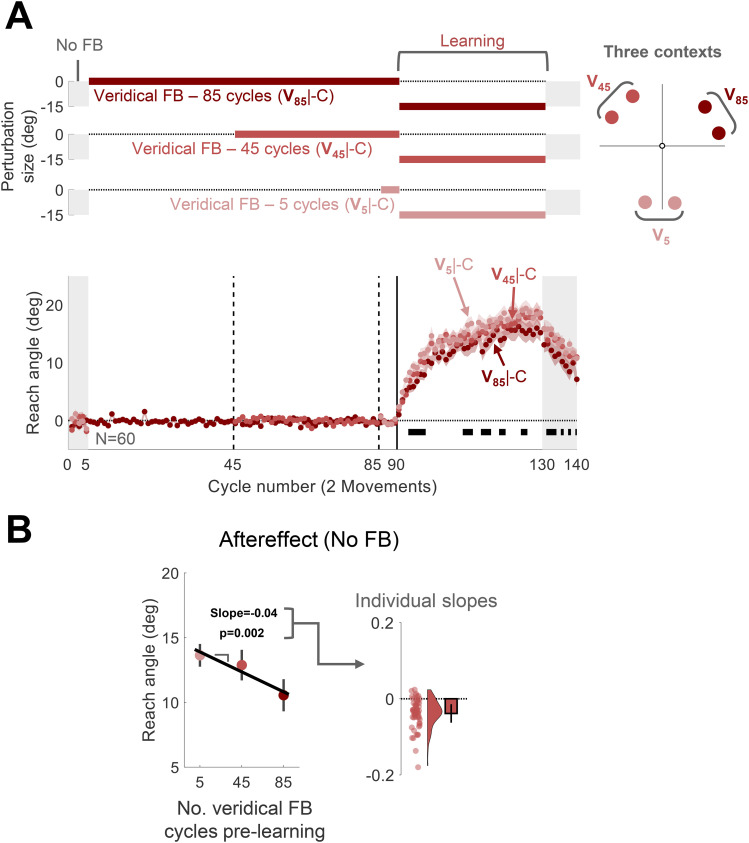
Savings refers to the gain in performance upon relearning. In sensorimotor adaptation, savings is tested by having participants adapt to perturbed feedback and, following a washout block during which the system resets to baseline, presenting the same perturbation again. While savings has been observed with these tasks, we have shown that the contribution from implicit adaptation, a process that uses errors to recalibrate the sensorimotor map, is attenuated upon relearning ( Avraham et al., 2021). Here, we test the hypothesis that this attenuation is due to interference arising from the different relationship between the movement and the feedback during washout. Removing the perturbation at the start of the washout block typically results in a salient error signal in the opposite direction to that observed during learning. We first replicated the finding that implicit adaptation is attenuated following a washout period that introduces salient opposite errors. When we eliminated feedback during washout, relearning was no longer attenuated, consistent with the interference hypothesis. Next, we created a scenario in which the perceived errors during washout were not salient, falling within the range of motor noise. Nonetheless, attenuation was still prominent. Inspired by this observation, we tested participants with an extended initial experience with veridical feedback and found that this was sufficient to attenuate adaptation during the first learning block. This effect was context specific and did not generalize to other movements. Taken together, the implicit sensorimotor adaptation system is highly sensitive to memory interference from a recent experience with a discrepant action-outcome contingency.
Keywords: associative learning; memory; reaching; sensorimotor adaptation.
Copyright © 2025 Avraham and Ivry.
Figures




Update of
-
Interference underlies attenuation upon relearning in sensorimotor adaptation.bioRxiv [Preprint]. 2024 Jun 1:2024.05.27.596118. doi: 10.1101/2024.05.27.596118. bioRxiv. 2024. Update in: eNeuro. 2025 Jun 26;12(6):ENEURO.0132-25.2025. doi: 10.1523/ENEURO.0132-25.2025. PMID: 38853972 Free PMC article. Updated. Preprint.
References
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources