

Research on rehabilitation robot control based on port-Hamiltonian systems and fatigue dissipation port compensation
- PMID: 40486205
- PMCID: PMC12141283
- DOI: 10.3389/fbioe.2025.1609548
Research on rehabilitation robot control based on port-Hamiltonian systems and fatigue dissipation port compensation
Abstract
Introduction: Upper-limb rehabilitation robots have been demonstrated to effectively promote motor recovery in stroke patients. However, in active training modes, control instability may be induced by the nonlinear and time-varying characteristics of muscle fatigue, increasing the risks of physical human-robot interaction and ultimately limiting rehabilitation outcomes.
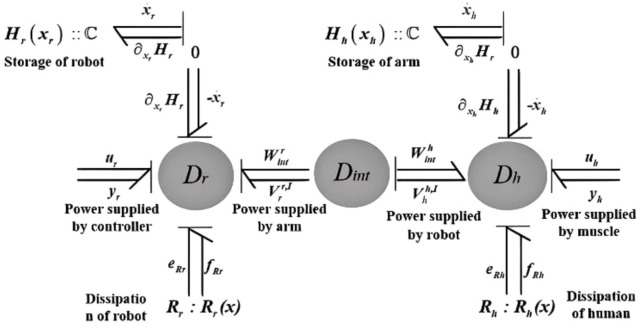
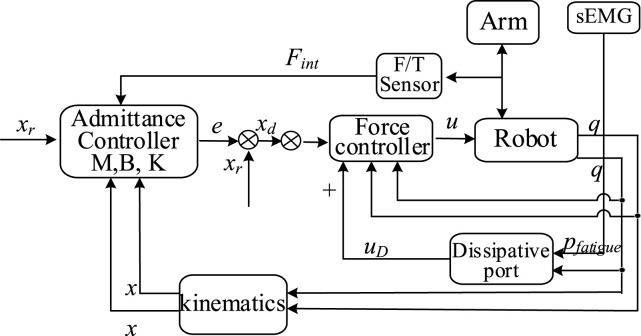
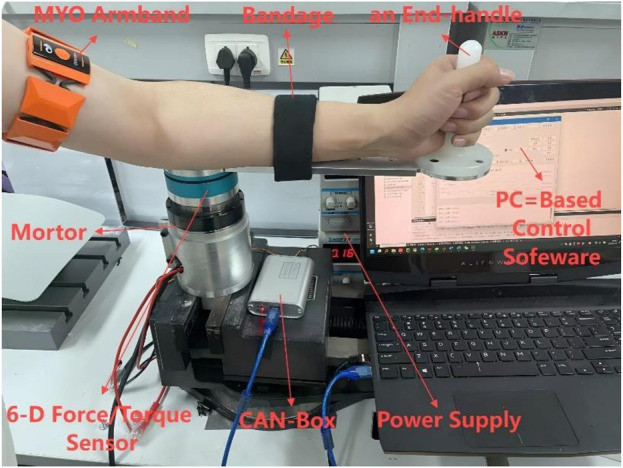
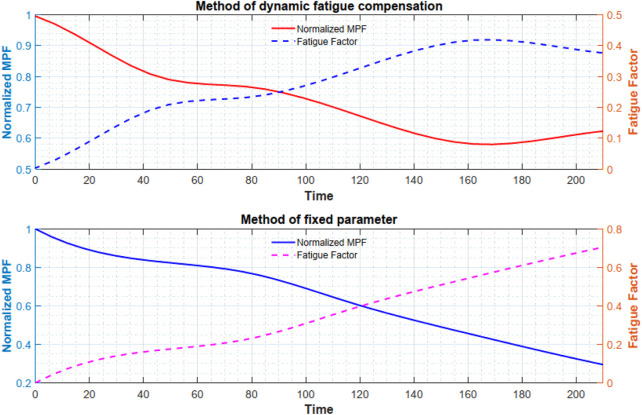
Methods: A novel control strategy within the port-Hamiltonian framework, incorporating a dynamic muscle fatigue model. Fatigue levels were assessed in real time using surface electromyography (sEMG) signals and mapped to damping parameters in joint space, enabling the port-based modeling of fatigue-related energy dissipation. A hierarchical control architecture was constructed, consisting of outer-loop admittance control and inner-loop energy shaping.
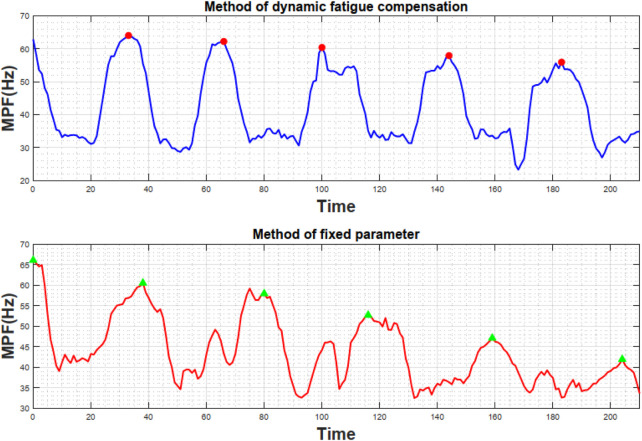
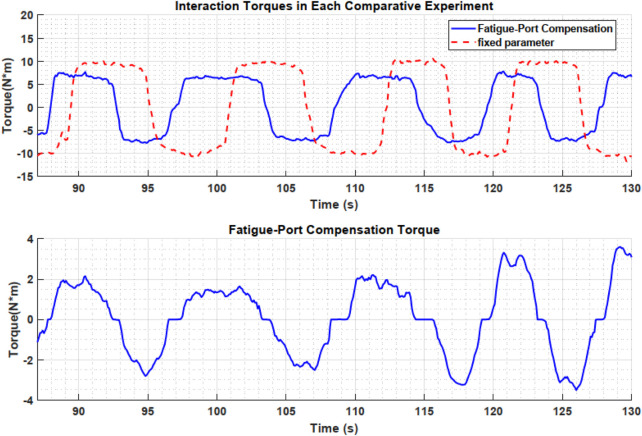
Results: Theoretical analysis confirmed that the closed-loop passivity of the system was preserved and stability was ensured. Experimental validation further showed that, compared to fixed damping parameters, the proposed fatigue compensation approach reduced muscle fatigue accumulation by 45% and increased training duration by 40%.
Discussion: The proposed fatigue-adaptive control framework was shown to enhance the safety, effectiveness, and physiological adaptability of rehabilitation training. The integration of real-time sEMG feedback and port-Hamiltonian modeling offers a promising solution for personalized robotic rehabilitation.
Keywords: human-robot interaction stability; muscle fatigue modeling; passivity-based control; port-Hamiltonian system; upper-limb rehabilitation robot.
Copyright © 2025 Li, Chen, Li, Yan, Li, Feng, Zhan and Shao.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

References
-
- Ai Q., Liu Z., Meng W., Liu Q., Xie S. Q. (2023). Uncertainty compensated high-order adaptive iteration learning control for robot-assisted upper limb rehabilitation. IEEE Trans. Automation Sci. Eng. 21 (4), 7004–7015. 10.1109/TASE.2023.3335401 - DOI
-
- Cai S., Xie P., Li G., Xie L. (2024). Compensation-corrective adaptive control strategy for upper-limb rehabilitation robots. Robotics Aut. Syst. 177, 104701. 10.1016/j.robot.2024.104701 - DOI
-
- Fujimoto K., Sakata N., Maruta I., Ferguson J. (2020). A passivity-based sliding mode controller for simple port-Hamiltonian systems. IEEE Control Syst. Lett. 5 (3), 839–844. 10.1109/LCSYS.2020.3005327 - DOI
-
- Ghajari S., Moghaddam R. K., Kobravi H., Pariz N. (2023). Muscle fatigue regulation through muscle activation control in a knee hybrid exoskeleton: simulation study. Machines 11 (10), 937. 10.3390/machines11100937 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources