

A linear perception-action mapping accounts for response range-dependent biases in heading estimation from optic flow
- PMID: 40489563
- PMCID: PMC12180628
- DOI: 10.1371/journal.pcbi.1013147
A linear perception-action mapping accounts for response range-dependent biases in heading estimation from optic flow
Abstract
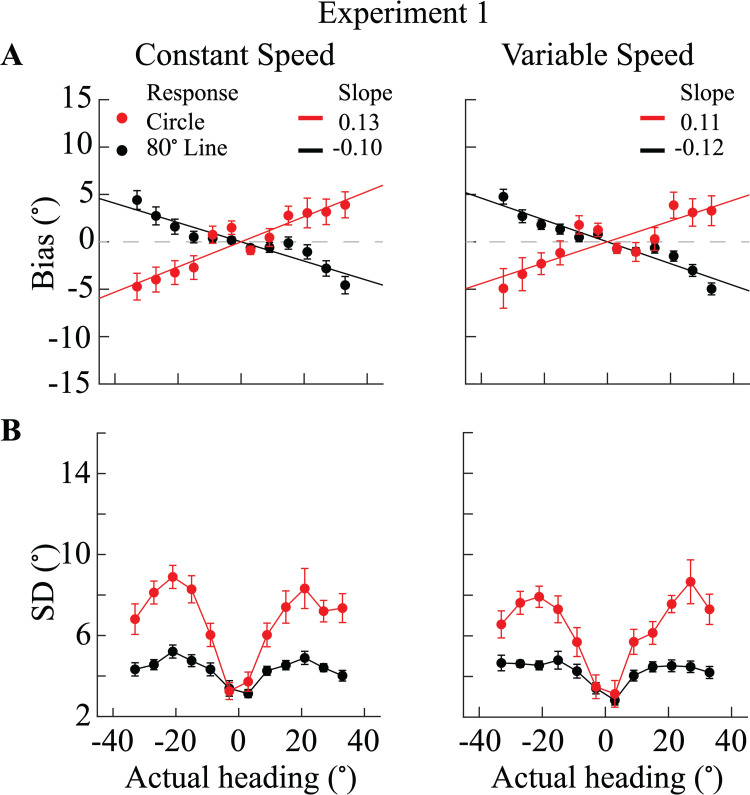
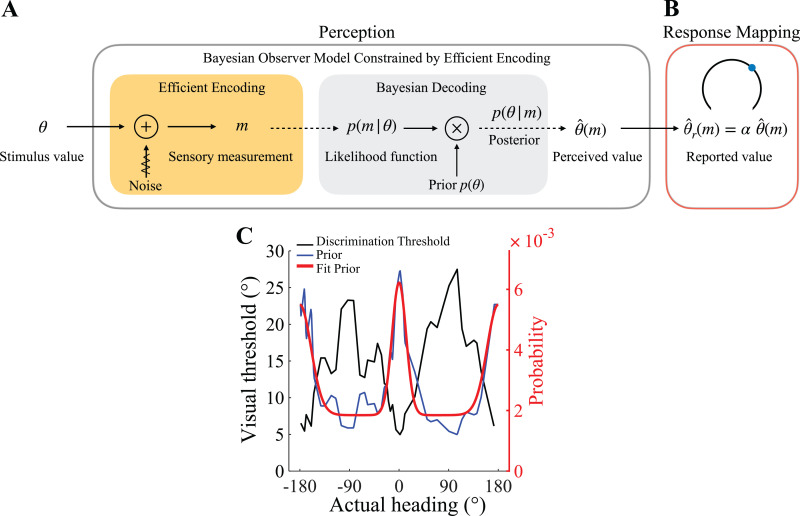
Accurate estimation of heading direction from optic flow is a crucial aspect of human spatial perception. Previous psychophysical studies have shown that humans are typically biased in their heading estimates, but the reported results are inconsistent. While some studies found that humans generally underestimate heading direction (center bias), others observed the opposite, an overestimation of heading direction (peripheral bias). We conducted three psychophysical experiments showing that these conflicting findings may not reflect inherent differences in heading perception but can be attributed to the different sizes of the response range that participants were allowed to utilize when reporting their estimates. Notably, we show that participants' heading estimates monotonically scale with the size of the response range, leading to underestimation for small and overestimation for large response ranges. Additionally, neither the speed profile of the optic flow pattern nor the response method (mouse vs. keyboard) significantly affected participants' estimates. Furthermore, we introduce a Bayesian heading estimation model that can quantitatively account for participants' heading reports. The model assumes efficient sensory encoding of heading direction according to a prior inferred from human heading discrimination data. In addition, the model assumes a response mapping that linearly scales the perceptual estimate with a scaling factor that monotonically depends on the size of the response range. This simple perception-action model accurately predicts participants' estimates both in terms of mean and variance across all experimental conditions. Our findings underscore that human heading perception follows efficient Bayesian inference; differences in participants reported estimates can be parsimoniously explained as differences in mapping percept to probe response.
Copyright: © 2025 Sun et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures




References
MeSH terms
LinkOut - more resources
Full Text Sources
