

Ultrasound Imaging of Artificial Tongues During Compression and Shearing of Food Gels on a Biomimetic Testing Bench
- PMID: 40490851
- PMCID: PMC12149359
- DOI: 10.1111/jtxs.70030
Ultrasound Imaging of Artificial Tongues During Compression and Shearing of Food Gels on a Biomimetic Testing Bench
Abstract
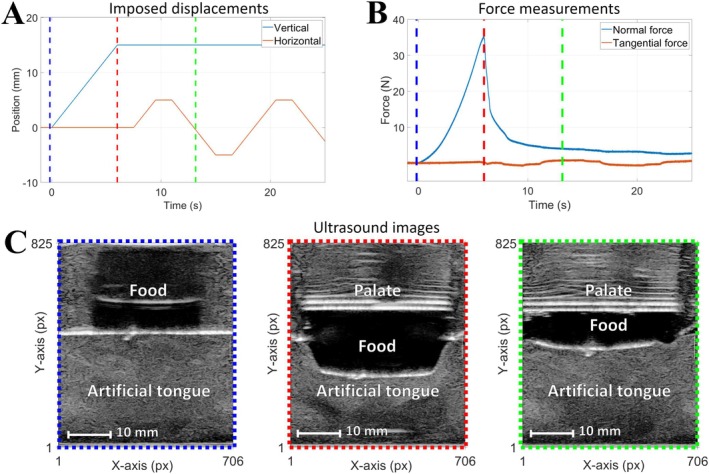
Characterizing the deformations undergone by the tongue during food oral processing could help to better understand how texture sensations are perceived. In this article, we propose to study the potential of ultrasound (US) imaging to monitor the deformations undergone by artificial tongues during compression and shear of agar food gels. Four polyvinyl alcohol cryogels were used as artificial tongues (two levels of roughness and two levels of stiffness), while three agar gels of different concentrations were considered as model foods. Throughout the experiments, US images were acquired from a transducer array positioned underneath the artificial tongue, while force signals were obtained from a multi-axes sensor located above an artificial palate plate. Image analysis first consisted of tracing the contour of the dorsal surface of the artificial tongue. It was thus possible to observe how the deformations are distributed between the artificial tongues and the agar gels and to follow over time the heterogeneity of this distribution along the axis of the transducer array. Then, Particle Image Velocimetry (PIV) analysis was conducted to characterize the velocity fields related to deformations within the artificial tongue. In particular, the horizontal component of the velocity was studied during the shear movements and allowed one to distinguish static and dynamic friction phases, and to highlight the deformation gradients in the bulk of the artificial tongue. Such US method can provide a better understanding of the impact of the mechanical properties of food gels on the stimulation of mechanoreceptors responsible for translating mechanical stimuli into sensory perceptions.
Keywords: artificial tongue; food gels; food oral processing; ultrasound imaging.
© 2025 The Author(s). Journal of Texture Studies published by Wiley Periodicals LLC.
Conflict of interest statement
Jean‐Luc Gennisson is a scientific consultant for the company Supersonic Imagine, which built up the ultrasound imaging device used in this study.
Figures






Similar articles
-
Application of biomimetic tongue substrate to investigate the role of friction and vibration in sensory texture perception.Food Res Int. 2025 Feb;203:115786. doi: 10.1016/j.foodres.2025.115786. Epub 2025 Jan 23. Food Res Int. 2025. PMID: 40022321
-
Compression Test of Soft Food Gels Using a Soft Machine with an Artificial Tongue.Foods. 2019 May 29;8(6):182. doi: 10.3390/foods8060182. Foods. 2019. PMID: 31146449 Free PMC article.
-
Texture contrast: Ultrasonic characterization of stacked gels' deformation during compression on a biomimicking tongue.Curr Res Food Sci. 2021 Jul 3;4:449-459. doi: 10.1016/j.crfs.2021.06.004. eCollection 2021. Curr Res Food Sci. 2021. PMID: 34308369 Free PMC article.
-
Food oral processing: conversion of food structure to textural perception.Annu Rev Food Sci Technol. 2013;4:237-66. doi: 10.1146/annurev-food-030212-182637. Epub 2012 Dec 12. Annu Rev Food Sci Technol. 2013. PMID: 23244397 Review.
-
Sucrose release from polysaccharide gels.Food Funct. 2016 May 18;7(5):2130-46. doi: 10.1039/c5fo01400j. Epub 2016 Mar 8. Food Funct. 2016. PMID: 26952168 Review.
References
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources