

Uncertainty-aware traction force microscopy
- PMID: 40505016
- PMCID: PMC12251289
- DOI: 10.1371/journal.pcbi.1013079
Uncertainty-aware traction force microscopy
Abstract
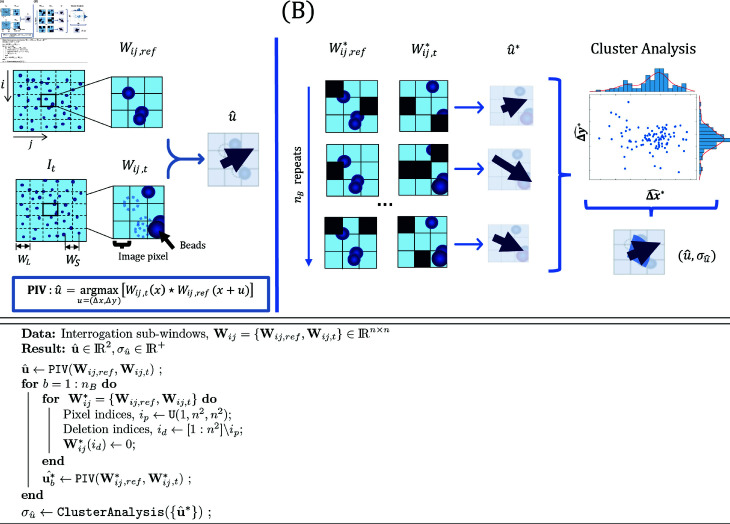
Traction Force Microscopy (TFM) is a versatile tool to quantify cell-exerted forces by imaging and tracking fiduciary markers embedded in elastic substrates. The computations involved in TFM are often ill-conditioned, and data smoothing or regularization is required to avoid overfitting the noise in the tracked displacements. Most TFM calculations depend critically on the heuristic selection of regularization (hyper-) parameters affecting the balance between overfitting and smoothing. However, TFM methods rarely estimate or account for measurement errors in substrate deformation to adjust the regularization level accordingly. Moreover, there is a lack of tools for uncertainty quantification (UQ) to understand how these errors propagate to the recovered traction stresses. These limitations make it difficult to interpret the TFM readouts and hinder comparing different experiments. This manuscript presents an uncertainty-aware TFM technique that estimates the variability in the magnitude and direction of the traction stress vector recovered at each point in space and time of each experiment. In this technique, a non-parametric bootstrap method perturbs the cross-correlation functional of Particle Image Velocimetry (PIV) to assess the uncertainty of the measured deformation. This information is passed on to a hierarchical Bayesian TFM framework with spatially adaptive regularization that propagates the uncertainty to the traction stress readouts (TFM-UQ). We evaluate TFM-UQ using synthetic datasets with prescribed image quality variations and demonstrate its application to experimental datasets. These studies show that TFM-UQ bypasses the need for subjective regularization parameter selection and locally adapts smoothing, outperforming traditional regularization methods. They also illustrate how uncertainty-aware TFM tools can be used to objectively choose key image analysis parameters like PIV window size. We anticipate that these tools will allow for decoupling biological heterogeneity from measurement variability and facilitate automating the analysis of large datasets by parameter-free, input data-based regularization.
Copyright: This is an open access article, free of all copyright, and may be freely reproduced, distributed, transmitted, modified, built upon, or otherwise used by anyone for any lawful purpose. The work is made available under the Creative Commons CC0 public domain dedication.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures








Update of
-
Uncertainty-Aware Traction Force Microscopy.bioRxiv [Preprint]. 2024 Jul 16:2024.07.05.602172. doi: 10.1101/2024.07.05.602172. bioRxiv. 2024. Update in: PLoS Comput Biol. 2025 Jun 12;21(6):e1013079. doi: 10.1371/journal.pcbi.1013079. PMID: 39026786 Free PMC article. Updated. Preprint.
References
-
- Hansen PC, O’Leary DP. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J Sci Comput. 1993;14(6):1487–503. doi: 10.1137/0914086 - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
