

Flow parsing as causal source separation allows fast and parallel object and self-motion estimation
- PMID: 40527912
- PMCID: PMC12174319
- DOI: 10.1038/s42003-025-08318-y
Flow parsing as causal source separation allows fast and parallel object and self-motion estimation
Abstract
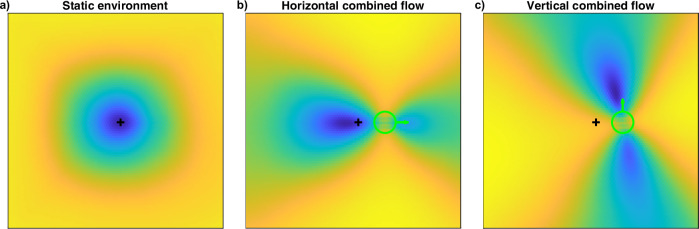
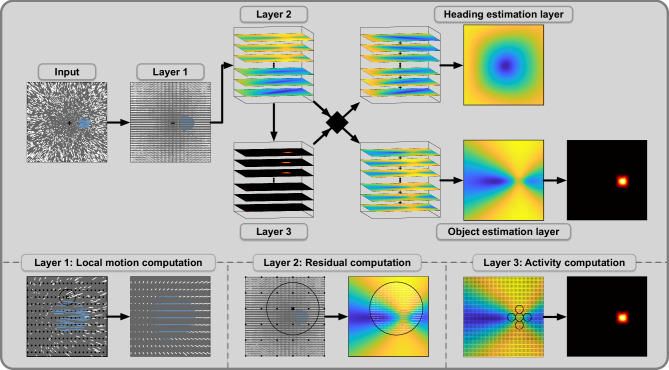
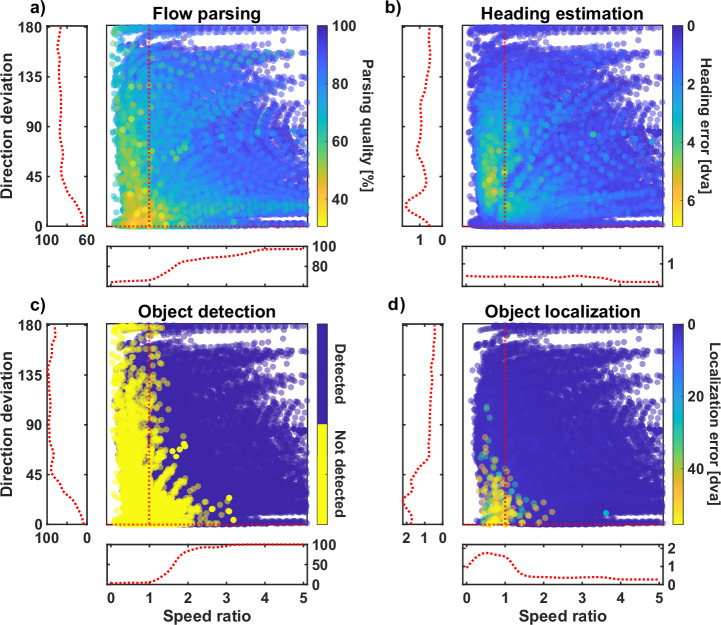
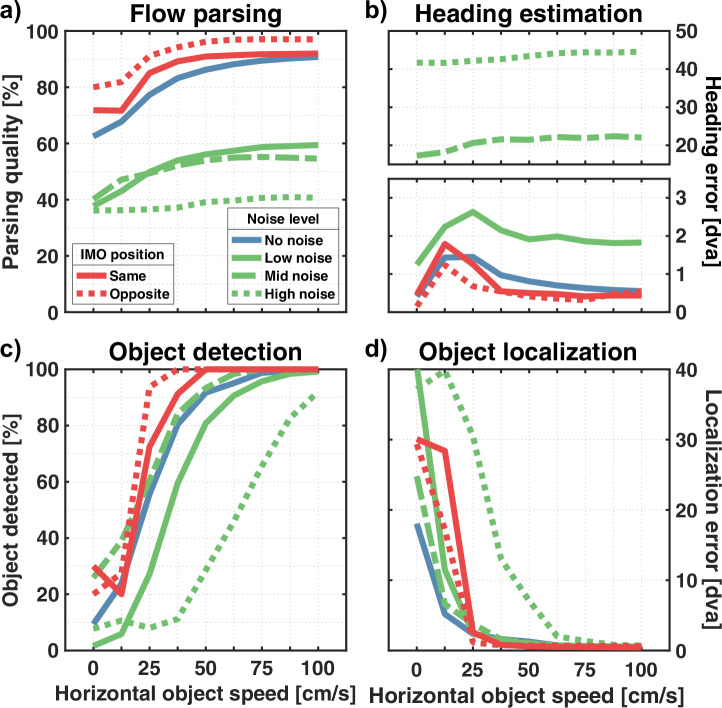
Optic flow, the retinal pattern of motion experienced during self-motion, contains information about one's direction of heading. The global pattern due to self-motion is locally confounded when moving objects are present, and the flow is the sum of components due to the different causal sources. Nonetheless, humans can accurately retrieve information from such flow, including the direction of heading and the scene-relative motion of an object. Flow parsing is a process speculated to allow the brain's sensitivity to optic flow to separate the causal sources of retinal motion in information due to self-motion and information due to object motion. In a computational model that retrieves object and self-motion information from optic flow, we implemented flow parsing based on heading likelihood maps, whose distributions indicate the consistency of parts of the flow with self-motion. This allows for concurrent estimation of heading, detecting and localizing a moving object, and estimating its scene-relative motion. We developed a paradigm that allows the model to perform all these estimations while systematically varying the object's contribution to the flow field. Simulations of that paradigm show that the model replicates many aspects of human performance, including the dependence of heading estimation on object speed and direction.
© 2025. The Author(s).
Conflict of interest statement
Competing interests: The authors declare no competing interests.
Figures





Similar articles
-
Flexible computation of object motion and depth based on viewing geometry inferred from optic flow.bioRxiv [Preprint]. 2025 May 19:2024.10.29.620928. doi: 10.1101/2024.10.29.620928. bioRxiv. 2025. PMID: 40475437 Free PMC article. Preprint.
-
Assessing the comparative effects of interventions in COPD: a tutorial on network meta-analysis for clinicians.Respir Res. 2024 Dec 21;25(1):438. doi: 10.1186/s12931-024-03056-x. Respir Res. 2024. PMID: 39709425 Free PMC article. Review.
-
Distinct detection and discrimination sensitivities in visual processing of real versus unreal optic flow.Psychon Bull Rev. 2025 Aug;32(4):1540-1550. doi: 10.3758/s13423-024-02616-y. Epub 2025 Jan 14. Psychon Bull Rev. 2025. PMID: 39810018
-
Surveillance for Violent Deaths - National Violent Death Reporting System, 50 States, the District of Columbia, and Puerto Rico, 2022.MMWR Surveill Summ. 2025 Jun 12;74(5):1-42. doi: 10.15585/mmwr.ss7405a1. MMWR Surveill Summ. 2025. PMID: 40493548 Free PMC article.
-
Defining disease severity in atopic dermatitis and psoriasis for the application to biomarker research: an interdisciplinary perspective.Br J Dermatol. 2024 Jun 20;191(1):14-23. doi: 10.1093/bjd/ljae080. Br J Dermatol. 2024. PMID: 38419411 Free PMC article. Review.
References
-
- Gibson, J. J. The Perception of the Visual World. (Houghton Mifflin, 1950).
-
- Longuet-Higgins, H. C. & Prazdny, K. The interpretation of a moving retinal image. Proc. R. Soc. Lond. Ser. B Biol. Sci.208, 385–397 (1980). - PubMed
-
- Warren, W. H., Morris, M. W. & Kalish, M. Perception of translational heading from optical flow. J. Exp. Psychol. Hum. Percept. Perform.14, 646–660 (1988). - PubMed
-
- Cutting, J. E., Springer, K., Braren, P. A. & Johnson, S. H. Wayfinding on foot from information in retinal, not optical, flow. J. Exp. Psychol. Gen.121, 41–72 (1992). - PubMed
-
- Lappe, M., Bremmer, F. & van den Berg, A. Perception of self-motion from visual flow. Trends Cogn. Sci.3, 329–336 (1999). - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
