

Alginate Sphere-Based Soft Actuators
- PMID: 40558731
- PMCID: PMC12192248
- DOI: 10.3390/gels11060432
Alginate Sphere-Based Soft Actuators
Abstract
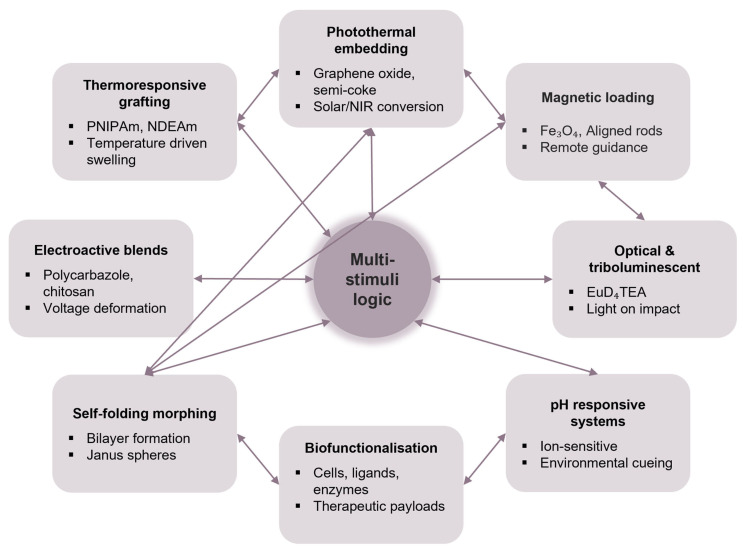
Alginate hydrogels offer distinct advantages as ionically crosslinked, biocompatible networks that can be shaped into spherical beads with high compositional flexibility. These spherical architectures provide isotropic geometry, modularity and the capacity for encapsulation, making them ideal platforms for scalable, stimuli-responsive actuation. Their ability to respond to thermal, magnetic, electrical, optical and chemical stimuli has enabled applications in targeted delivery, artificial muscles, microrobotics and environmental interfaces. This review examines recent advances in alginate sphere-based actuators, focusing on fabrication methods such as droplet microfluidics, coaxial flow and functional surface patterning, and strategies for introducing multi-stimuli responsiveness using smart polymers, nanoparticles and biologically active components. Actuation behaviours are understood and correlated with physical mechanisms including swelling kinetics, photothermal effects and the field-induced torque, supported by analytical and multiphysics models. Their demonstrated functionalities include shape transformation, locomotion and mechano-optical feedback. The review concludes with an outlook on the existing limitations, such as the material stability, cyclic durability and integration complexity, and proposes future directions toward the development of autonomous, multifunctional soft systems.
Keywords: alginate; hydrogel sphere; smart materials; soft actuators; stimuli-responsive polymers.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures





Similar articles
-
Stimuli-Responsive DNA Hydrogel Design Strategies for Biomedical Applications.Biosensors (Basel). 2025 Jun 4;15(6):355. doi: 10.3390/bios15060355. Biosensors (Basel). 2025. PMID: 40558437 Free PMC article. Review.
-
The use of Open Dialogue in Trauma Informed Care services for mental health consumers and their family networks: A scoping review.J Psychiatr Ment Health Nurs. 2024 Aug;31(4):681-698. doi: 10.1111/jpm.13023. Epub 2024 Jan 17. J Psychiatr Ment Health Nurs. 2024. PMID: 38230967
-
How lived experiences of illness trajectories, burdens of treatment, and social inequalities shape service user and caregiver participation in health and social care: a theory-informed qualitative evidence synthesis.Health Soc Care Deliv Res. 2025 Jun;13(24):1-120. doi: 10.3310/HGTQ8159. Health Soc Care Deliv Res. 2025. PMID: 40548558
-
How to Implement Digital Clinical Consultations in UK Maternity Care: the ARM@DA Realist Review.Health Soc Care Deliv Res. 2025 May;13(22):1-77. doi: 10.3310/WQFV7425. Health Soc Care Deliv Res. 2025. PMID: 40417997 Review.
-
Thermally Actuated Soft Robotics.Adv Mater. 2025 Jul 25:e04683. doi: 10.1002/adma.202504683. Online ahead of print. Adv Mater. 2025. PMID: 40708385 Review.
References
-
- Ding M., Jing L., Yang H., Machnicki C.E., Fu X., Li K., Wong I.Y., Chen P.Y. Multifunctional soft machines based on stimuli-responsive hydrogels: From freestanding hydrogels to smart integrated systems. Mater. Today Adv. 2020;8:100088. doi: 10.1016/j.mtadv.2020.100088. - DOI
-
- Chen L.Z., Liu F.F., Abdiryim T., Liu X. Stimuli-responsive hydrogels as promising platforms for soft actuators. Mater. Today Phys. 2024;40:101281. doi: 10.1016/j.mtphys.2023.101281. - DOI
-
- Ionov L. Hydrogel-based actuators: Possibilities and limitations. Mater. Today. 2014;17:494–503. doi: 10.1016/j.mattod.2014.07.002. - DOI
-
- Zhang X., Aziz S., Salahuddin B., Zhu Z. Thermoresponsive hydrogel artificial muscles. Matter. 2023;6:2735–2775. doi: 10.1016/j.matt.2023.05.030. - DOI
Publication types
LinkOut - more resources
Full Text Sources
