

Component orientation measurements in total hip arthroplasty using an inertial measurement unit-based smart trial system
- PMID: 40563123
- PMCID: PMC12188666
- DOI: 10.1186/s42836-025-00312-3
Component orientation measurements in total hip arthroplasty using an inertial measurement unit-based smart trial system
Abstract
Background: Intraoperative measurement of component orientation represents a basis for optimizing outcomes after total hip arthroplasty (THA). Although the use of computer navigation systems in THA has improved the accuracy of component positioning, they have not gained widespread popularity due to their complexity, time demands, and time-consuming protocols.
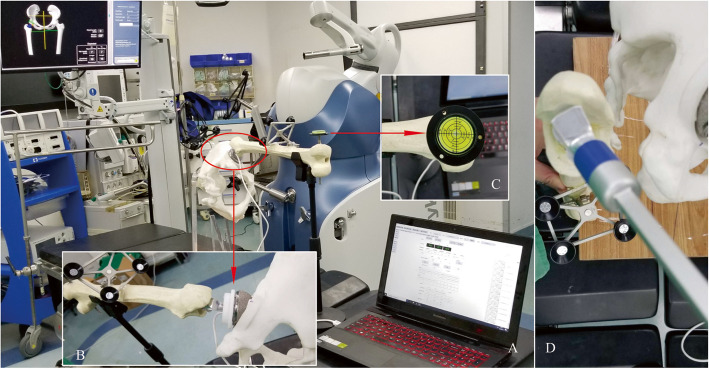
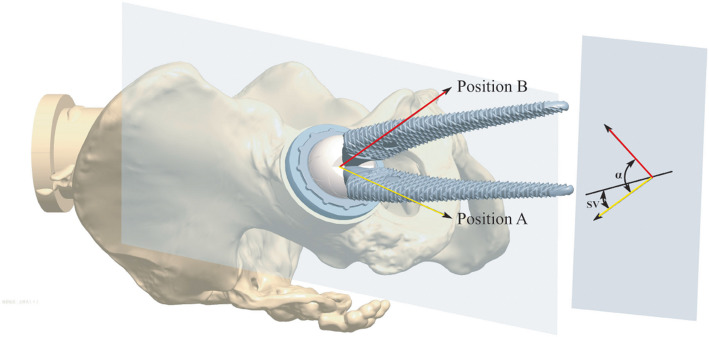
Methods: We developed an Inertial Measurement Unit-based Hip Smart Trial system (IMUHST) to assist with intra-operative monitoring of hip posture. An in vitro validation experiment was conducted using a sawbones with a three-dimensional (3D) measurement model as the reference standard.
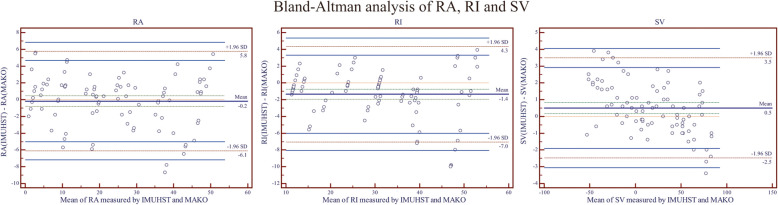
Results: The absolute mean error, Bland-Altman analysis, and Intra-class Correlation Coefficient revealed that the accuracy and precision of this system meet the threshold for clinical application.
Conclusions: In conclusion, this in vitro validation demonstrates that the IMUHST system provides accurate component orientation measurements while eliminating the cost and complexity of optical navigation, offering a practical solution for widespread adoption. Video Abstract.
Keywords: Anteversion; Computer-assisted surgery; Inclination; Inertial measurement unit; Smart trial system; Total hip arthroplasty.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Ethics approval and consent to participate: Ethical approval is not required in this study. Consent for publication: All presentations provided consent for publication. Competing interests: Yixin Zhou is the Editorial Board Member of Arthroplasty, and other authors declare that they have no competing interests. All authors were not involved in the journal’s review or decisions related to this manuscript.
Figures
Similar articles
-
Assistive devices, hip precautions, environmental modifications and training to prevent dislocation and improve function after hip arthroplasty.Cochrane Database Syst Rev. 2016 Jul 4;7(7):CD010815. doi: 10.1002/14651858.CD010815.pub2. Cochrane Database Syst Rev. 2016. PMID: 27374001 Free PMC article.
-
Minimally invasive and computer-navigated total hip arthroplasty: a qualitative and systematic review of the literature.BMC Musculoskelet Disord. 2010 May 17;11:92. doi: 10.1186/1471-2474-11-92. BMC Musculoskelet Disord. 2010. PMID: 20470443 Free PMC article.
-
Monitoring hip posture in total hip arthroplasty using an inertial measurement unit-based hip smart trial system: An in vitro validation experiment using a fixed pelvis model.J Biomech. 2019 Dec 3;97:109415. doi: 10.1016/j.jbiomech.2019.109415. Epub 2019 Oct 10. J Biomech. 2019. PMID: 31630776
-
Exercise interventions and patient beliefs for people with hip, knee or hip and knee osteoarthritis: a mixed methods review.Cochrane Database Syst Rev. 2018 Apr 17;4(4):CD010842. doi: 10.1002/14651858.CD010842.pub2. Cochrane Database Syst Rev. 2018. PMID: 29664187 Free PMC article.
-
Precision and accuracy of imageless navigation versus freehand implantation of total hip arthroplasty: A systematic review and meta-analysis.Int J Med Robot. 2017 Dec;13(4). doi: 10.1002/rcs.1843. Epub 2017 May 29. Int J Med Robot. 2017. PMID: 28556582
References
-
- Esposito CI, Walter WL, Roques A, Tuke MA, Zicat BA, Walsh WR, Walter WK. Wear in alumina-on-alumina ceramic total hip replacements: a retrieval analysis of edge loading. The Journal of bone and joint surgery British. 2012;94(7):901. - PubMed
-
- Biedermann R, Tonin A, Krismer M, Rachbauer F, Eibl G, Stockl B. Reducing the risk of dislocation after total hip arthroplasty: the effect of orientation of the acetabular component. The Journal of bone and joint surgery British. 2005;87(6):762. - PubMed
Grants and funding
- 2024YFB3817500/National Key Research & Development Program of China
- BJPSTP-2024-25/Beijing Physician Scientist Training Project
- 82472538/National Natural Science Foundation of China
- 52035012/National Natural Science Foundation of China
- BJRITO-RDP-2023/the Beijing Municipal Administration of Hospitals Program
LinkOut - more resources
Full Text Sources