

Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries
- PMID: 40573697
- PMCID: PMC12196908
- DOI: 10.3390/s25123810
Embedded Sensor Data Fusion and TinyML for Real-Time Remaining Useful Life Estimation of UAV Li Polymer Batteries
Abstract
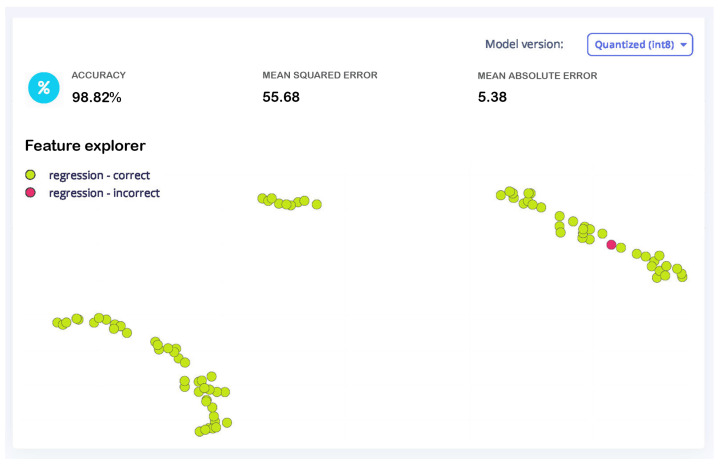
The accurate real-time estimation of the remaining useful life (RUL) of lithium-polymer (LiPo) batteries is a critical enabler for ensuring the safety, reliability, and operational efficiency of unmanned aerial vehicles (UAVs). Nevertheless, achieving such prognostics on resource-constrained embedded platforms remains a considerable technical challenge. This study proposes an end-to-end TinyML-based framework that integrates embedded sensor data fusion with an optimized feedforward neural network (FFNN) model for efficient RUL estimation under strict hardware limitations. The system collects voltage, discharge time, and capacity measurements through a lightweight data fusion pipeline and leverages the Edge Impulse platform with the EON™Compiler for model optimization. The trained model is deployed on a dual-core ARM Cortex-M0+ Raspberry Pi RP2040 microcontroller, communicating wirelessly with a LabVIEW-based visualization system for real-time monitoring. Experimental validation on an 80-gram UAV equipped with a 1100 mAh LiPo battery demonstrates a mean absolute error (MAE) of 3.46 cycles and a root mean squared error (RMSE) of 3.75 cycles. Model testing results show an overall accuracy of 98.82%, with a mean squared error (MSE) of 55.68, a mean absolute error (MAE) of 5.38, and a variance score of 0.99, indicating strong regression precision and robustness. Furthermore, the quantized (int8) version of the model achieves an inference latency of 2 ms, with memory utilization of only 1.2 KB RAM and 11 KB flash, confirming its suitability for real-time deployment on resource-constrained embedded devices. Overall, the proposed framework effectively demonstrates the feasibility of combining embedded sensor data fusion and TinyML to enable accurate, low-latency, and resource-efficient real-time RUL estimation for UAV battery health management.
Keywords: TinyML; UAV Li polymer battery monitoring; real-time embedded systems; remaining useful life (RUL) estimation; sensor data fusion.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures


























Similar articles
-
Optimising TinyML with quantization and distillation of transformer and mamba models for indoor localisation on edge devices.Sci Rep. 2025 Mar 24;15(1):10081. doi: 10.1038/s41598-025-94205-9. Sci Rep. 2025. PMID: 40128553 Free PMC article.
-
Sustainable E-Health: Energy-Efficient Tiny AI for Epileptic Seizure Detection via EEG.Biomed Eng Comput Biol. 2025 Aug 10;16:11795972241283101. doi: 10.1177/11795972241283101. eCollection 2025. Biomed Eng Comput Biol. 2025. PMID: 40792199 Free PMC article.
-
Estimation of state of health for lithium-ion batteries using advanced data-driven techniques.Sci Rep. 2025 Aug 19;15(1):30438. doi: 10.1038/s41598-025-93775-y. Sci Rep. 2025. PMID: 40830261 Free PMC article.
-
Monitoring strategies for clinical intervention studies.Cochrane Database Syst Rev. 2021 Dec 8;12(12):MR000051. doi: 10.1002/14651858.MR000051.pub2. Cochrane Database Syst Rev. 2021. PMID: 34878168 Free PMC article.
-
Supervised exercise therapy versus home-based exercise therapy versus walking advice for intermittent claudication.Cochrane Database Syst Rev. 2018 Apr 6;4(4):CD005263. doi: 10.1002/14651858.CD005263.pub4. Cochrane Database Syst Rev. 2018. PMID: 29627967 Free PMC article.
References
-
- Sierra G., Orchard M., Goebel K., Kulkarni C. Battery Health Management for Small-Size Rotary-Wing Electric Unmanned Aerial Vehicles: An Efficient Approach for Constrained Computing Platforms. Reliab. Eng. Syst. Saf. 2019;182:166–178. doi: 10.1016/j.ress.2018.04.030. - DOI
-
- Zhang Z., Si X., Hu C., Lei Y. Degradation Data Analysis and Remaining Useful Life Estimation: A Review on Wiener-Process-Based Methods. Eur. J. Oper. Res. 2018;271:775–796. doi: 10.1016/j.ejor.2018.02.033. - DOI
-
- Zhang Y., Yang Y., Li H., Xiu X., Liu W. A Data-Driven Modeling Method for Stochastic Nonlinear Degradation Process with Application to RUL Estimation. IEEE Trans. Syst. Man Cybern. Syst. 2022;52:3847–3858. doi: 10.1109/TSMC.2021.3073052. - DOI
-
- Si X., Zhang Z., Hu C. Data-Driven Remaining Useful Life Prognosis Techniques: Stochastic Models, Methods and Applications. Springer; Cham, Switzerland: 2017. pp. 3–21.
-
- Li L., Saldivar A.A.F., Bai Y., Li Y. Battery Remaining Useful Life Prediction with Inheritance Particle Filtering. Energies. 2019;12:2784. doi: 10.3390/en12142784. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
