

Technology Roadmap of Micro/Nanorobots
- PMID: 40577644
- PMCID: PMC12269370
- DOI: 10.1021/acsnano.5c03911
Technology Roadmap of Micro/Nanorobots
Abstract
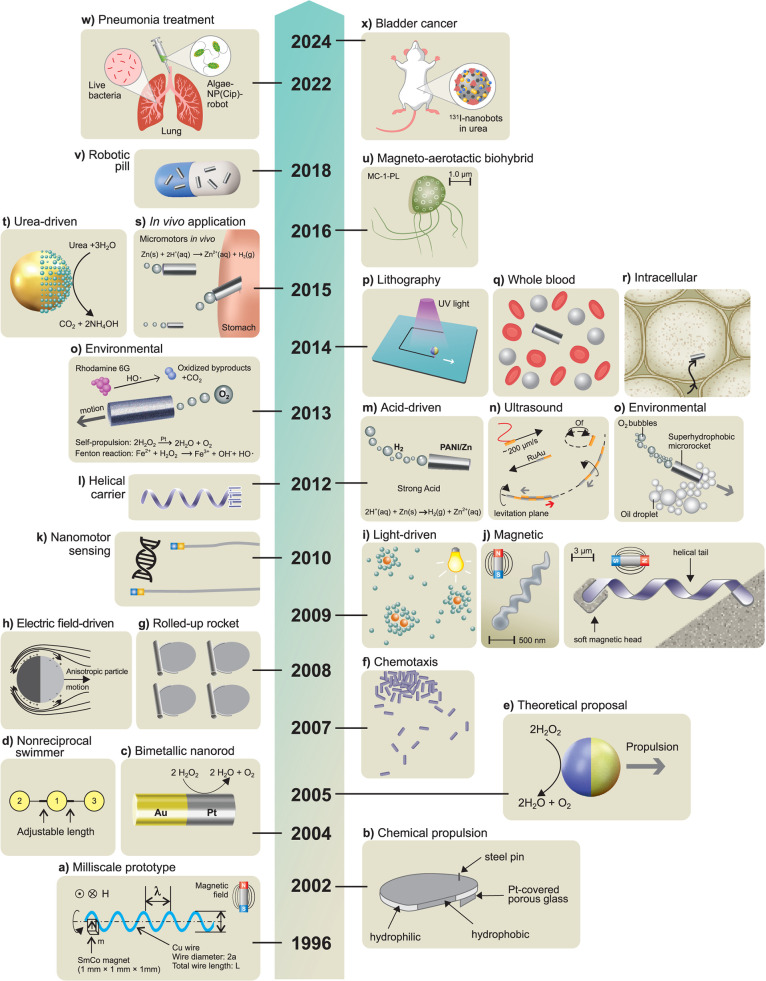
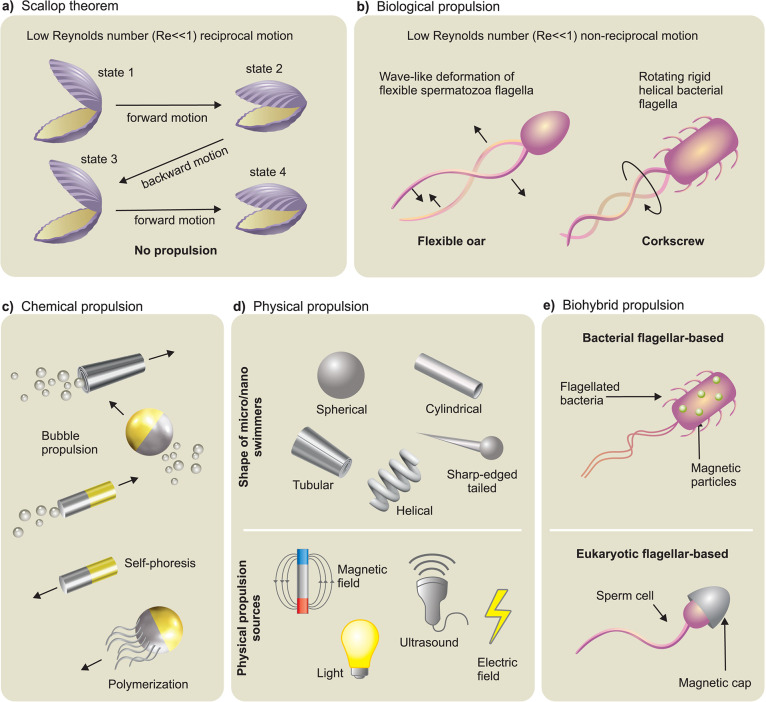
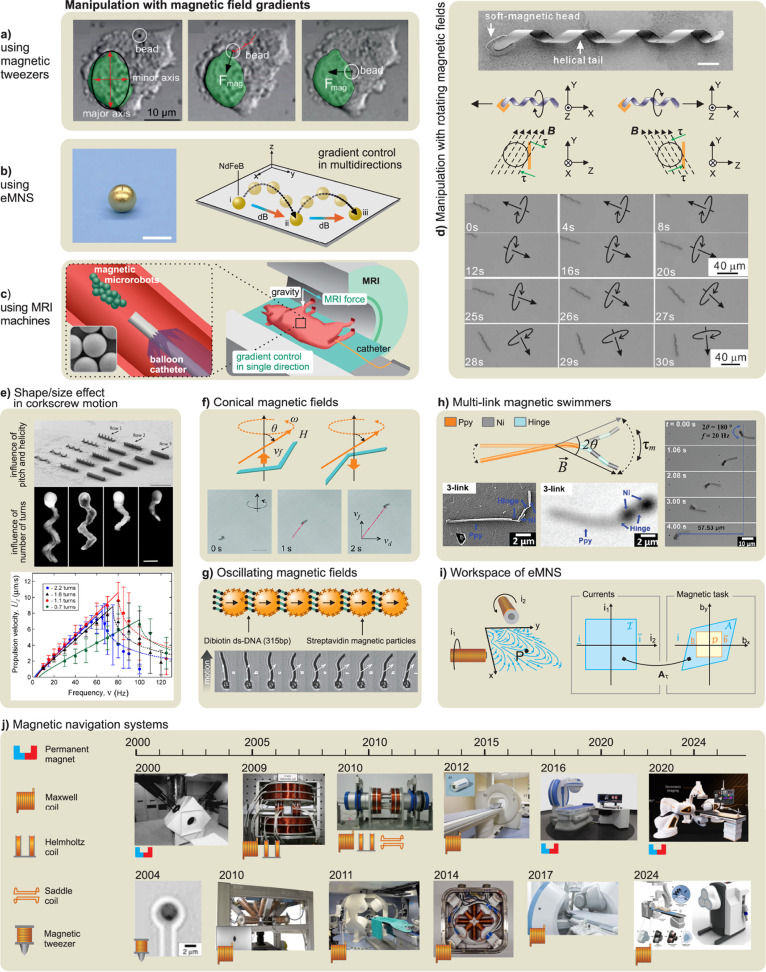
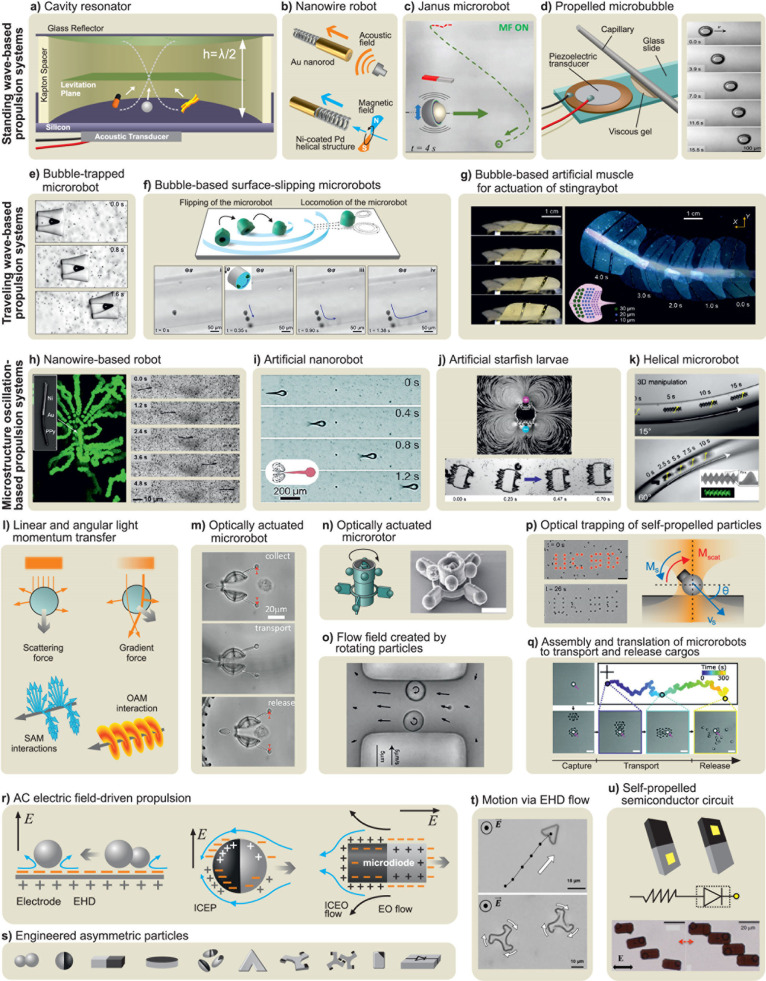
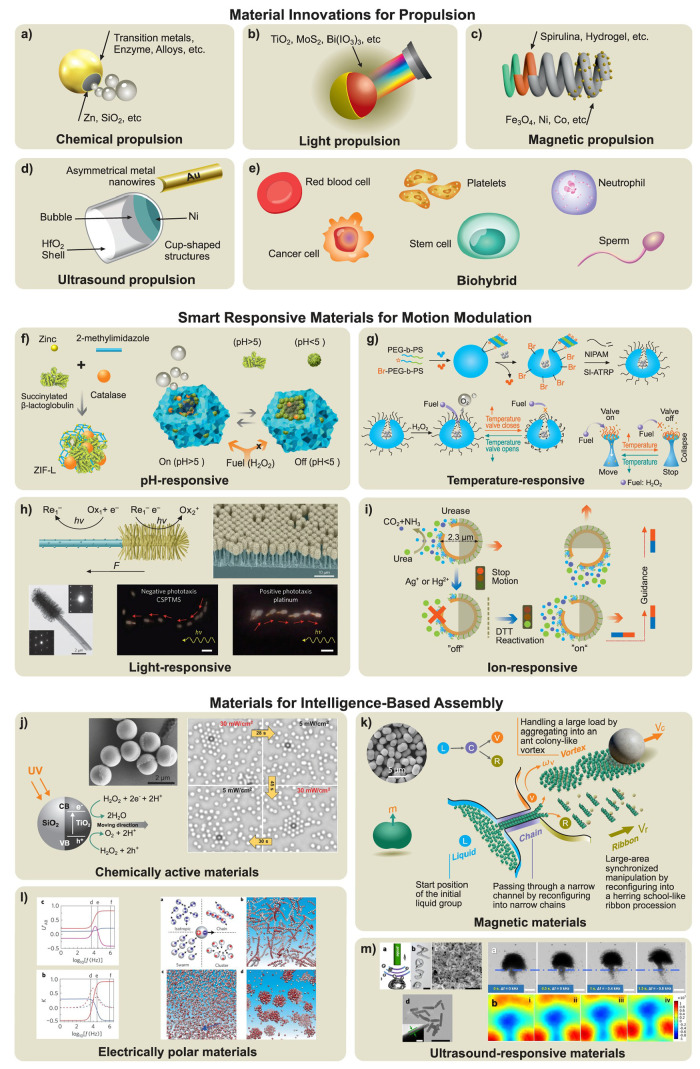
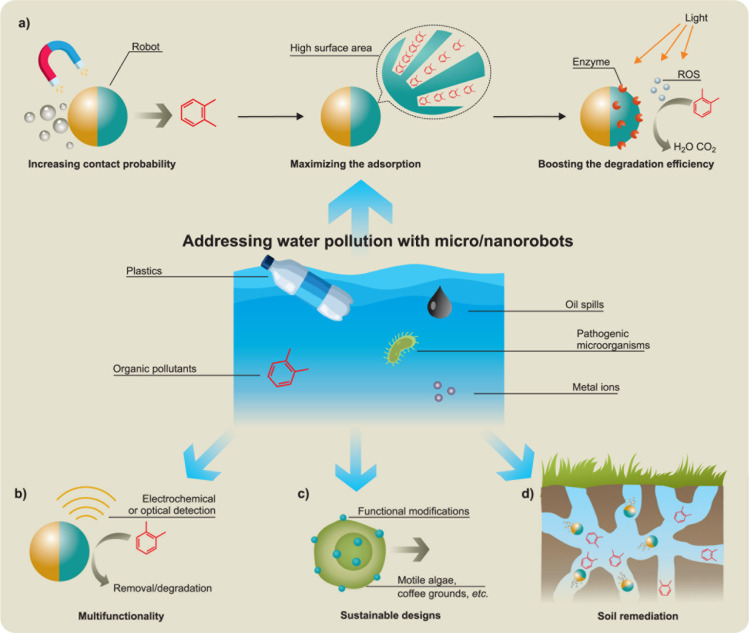
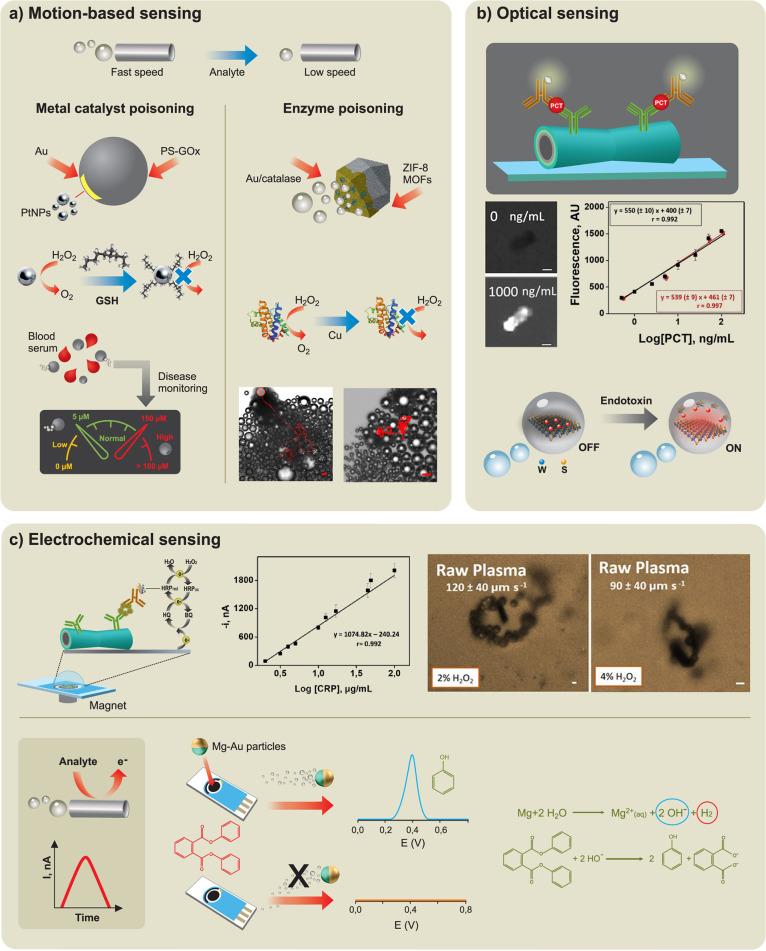
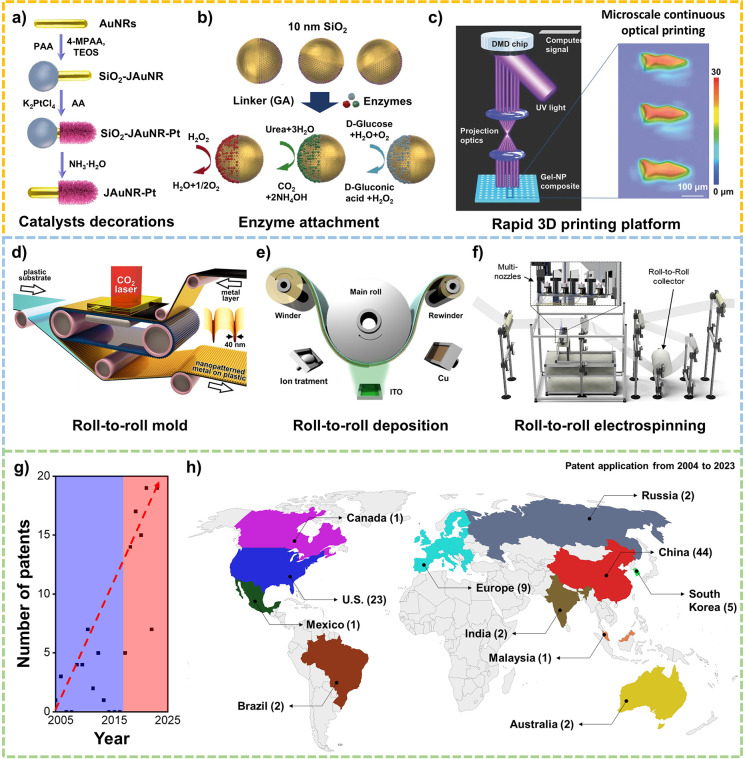
Inspired by Richard Feynman's 1959 lecture and the 1966 film Fantastic Voyage, the field of micro/nanorobots has evolved from science fiction to reality, with significant advancements in biomedical and environmental applications. Despite the rapid progress, the deployment of functional micro/nanorobots remains limited. This review of the technology roadmap identifies key challenges hindering their widespread use, focusing on propulsion mechanisms, fundamental theoretical aspects, collective behavior, material design, and embodied intelligence. We explore the current state of micro/nanorobot technology, with an emphasis on applications in biomedicine, environmental remediation, analytical sensing, and other industrial technological aspects. Additionally, we analyze issues related to scaling up production, commercialization, and regulatory frameworks that are crucial for transitioning from research to practical applications. We also emphasize the need for interdisciplinary collaboration to address both technical and nontechnical challenges, such as sustainability, ethics, and business considerations. Finally, we propose a roadmap for future research to accelerate the development of micro/nanorobots, positioning them as essential tools for addressing grand challenges and enhancing the quality of life.
Keywords: collective behavior; functionality; intelligence; micro/nanorobots; nanotechnology; propulsion; smart materials; technological translation.
Figures



References
-
- Feynman, R. P. Plenty of Room at the Bottom. In APS annual meeting, 1959; Little Brown Boston, MA, United States: pp 1-7.
-
- Wang, J. Nanomachines: Fundamentals and Applications; John Wiley & Sons, 2013.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
