

From in vitro to in vivo: Diverse applications of kirigami technology in medical devices
- PMID: 40585023
- PMCID: PMC12205689
- DOI: 10.1016/j.mtbio.2025.101961
From in vitro to in vivo: Diverse applications of kirigami technology in medical devices
Abstract
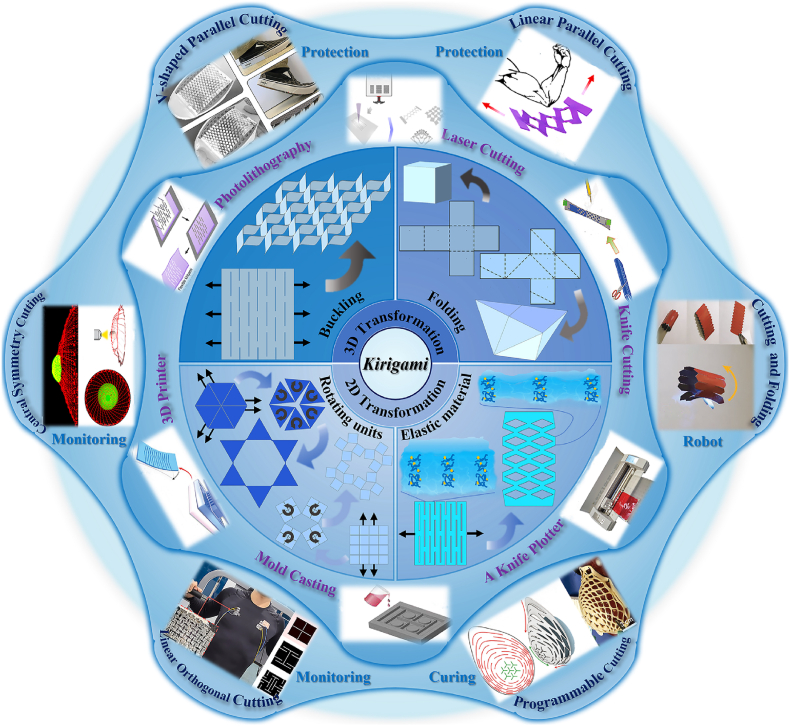
Kirigami, as a paper-cutting art, has developed into an innovative design and manufacture strategy with the support of material diversity and modern manufacturing technology. Combining the mechanical, electrical, and magnetic properties of materials, carefully designed geometric shapes can significantly improve mechanical flexibility, two-dimensional and three-dimensional reconfiguration, and functionality. This paper focuses on medical devices, and reviews the pattern design, deformation characteristics, function realization and diversified applications of advanced kirigami technology in this field. And the design influencing factors, basic deformation mechanism and various fabrication methods of kirigami are also discussed. Medical devices are mainly classified by in vitro and in vivo applications, with different functions such as monitoring, power supply, and treatment as sub-categories. At the same time, the application potential of kirigami-based smart devices in medical applications and the auxiliary role of simulation technology in design are discussed. On this basis, the challenges and prospects of the research and development in the field of medical health inspired by kirigami are summarized and prospected.
Keywords: In vitro and in vivo medical devices; Kirigami; Smart technology.
© 2025 The Author(s).
Conflict of interest statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures














References
-
- Gao B., Elbaz A., He Z., Xie Z., Xu H., et al. Bioinspired kirigami fish‐based highly stretched wearable biosensor for human biochemical–physiological hybrid monitoring. Adv. Mater. Technol. 2018;3 doi: 10.1002/admt.201700308. - DOI
Publication types
LinkOut - more resources
Full Text Sources
