

Chemotactic navigation in robotic swimmers via reset-free hierarchical reinforcement learning
- PMID: 40593554
- PMCID: PMC12215520
- DOI: 10.1038/s41467-025-60646-z
Chemotactic navigation in robotic swimmers via reset-free hierarchical reinforcement learning
Abstract
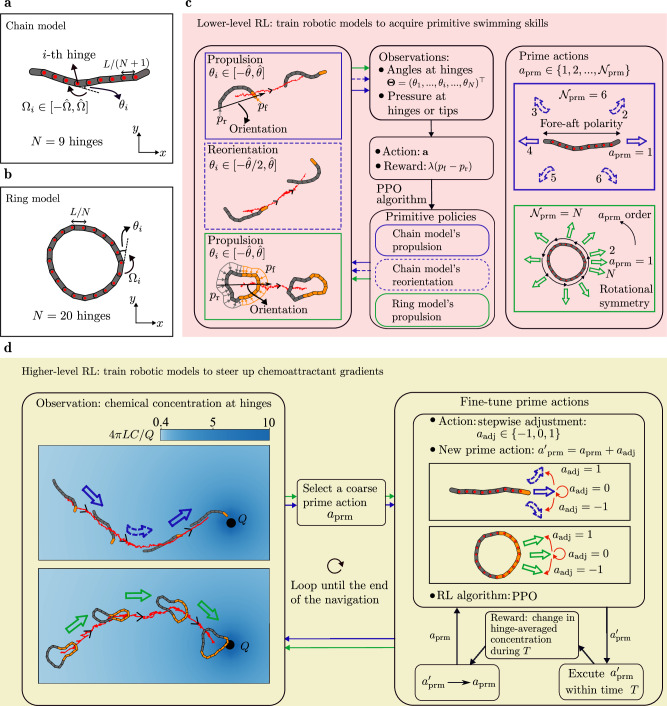
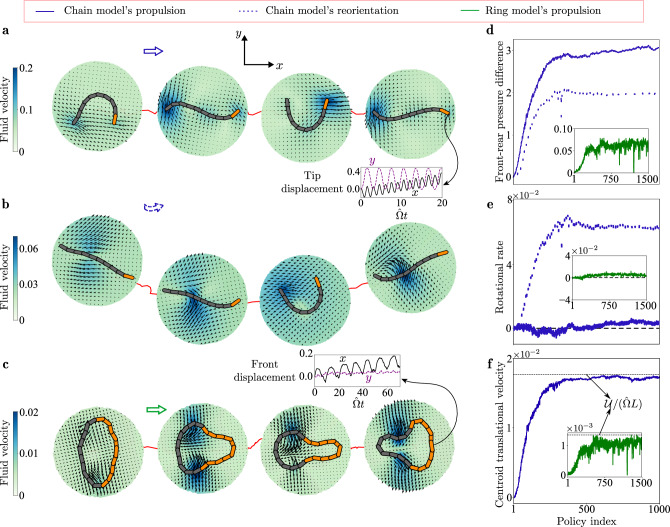
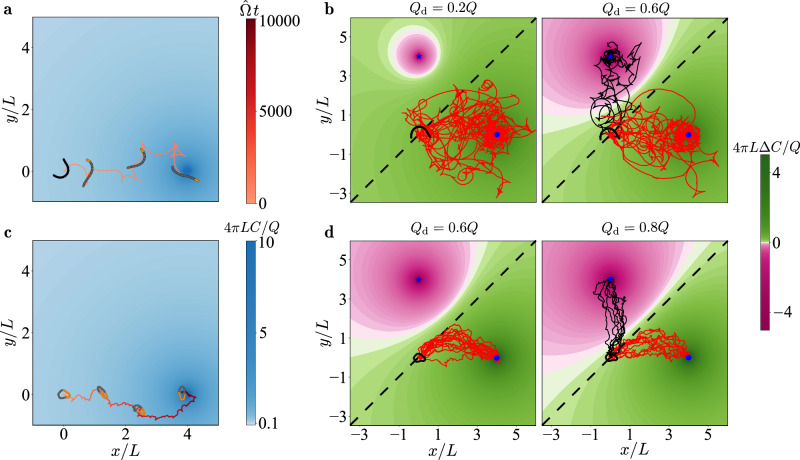
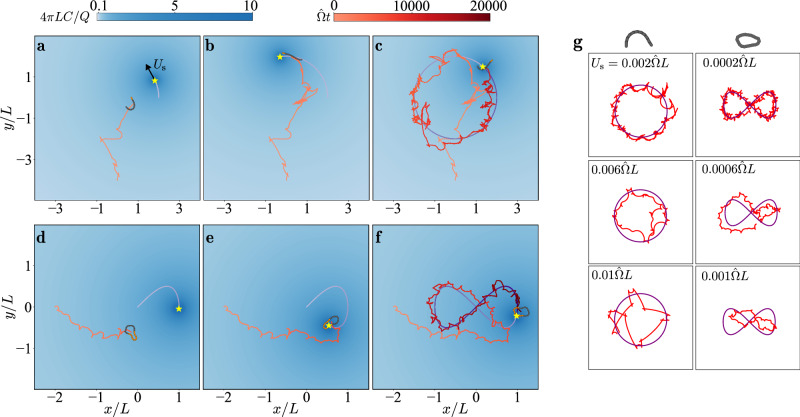
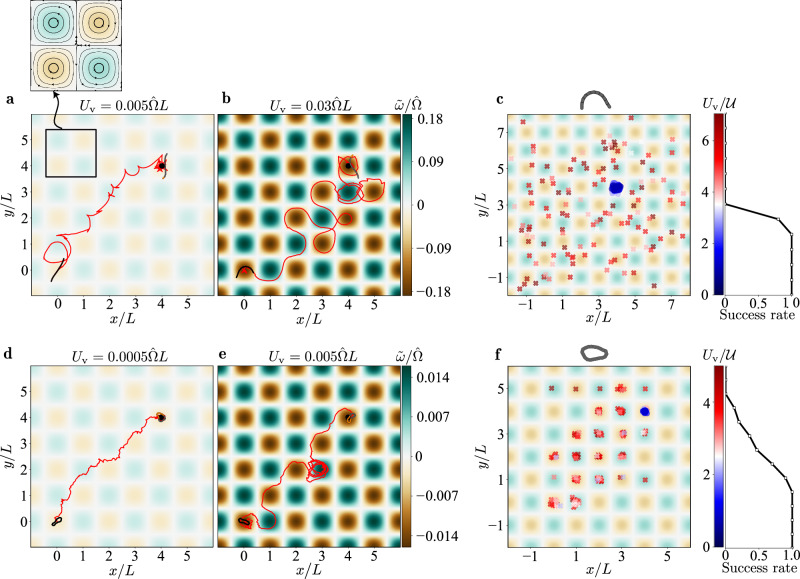
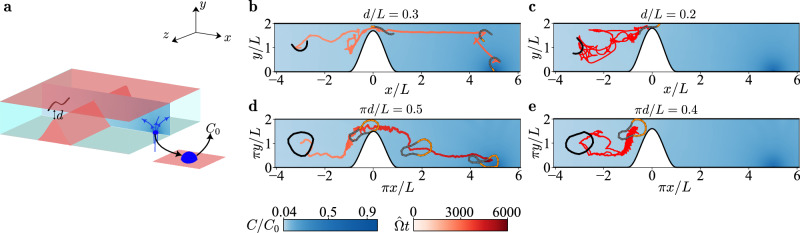
Microorganisms have evolved diverse strategies to propel themselves in viscous fluids, navigate complex environments, and exhibit taxis in response to stimuli. This has inspired the development of miniature robots, where artificial intelligence (AI) is playing an increasingly important role. Can AI endow these synthetic systems with intelligence akin to that honed through natural evolution? Here, we demonstrate, in silico, chemotactic navigation in a multi-link robotic model using two-level hierarchical reinforcement learning (RL). The lower-level RL allows the model-configured as a chain or ring topology-to acquire topology-adapted swimming gaits: wave propagation characteristic of flagella or body oscillation akin to an amoebae. Such chain and ring swimmers, further enabled by the higher-level RL, accomplish chemotactic navigation in prototypical biologically relevant scenarios that feature conflicting chemoattractants, pursuing a swimming bacterial mimic, steering in vortical flows, and squeezing through tight constrictions. Additionally, we achieve reset-free RL under partial observability, where simulated robots rely solely on local scalar observations rather than global or vectorial data. This advancement illuminates potential solutions for overcoming persistent challenges of manual resets and partial observability in real-world microrobotic RL.
© 2025. The Author(s).
Conflict of interest statement
Inclusion an ethics statement: All collaborators of this work have fulfilled the criteria for authorship required by Nature Portfolio journals and have been included as authors, as their participation was important for the design and implementation of the study. Roles and responsibilities were agreed upon among collaborators ahead of the research. This work includes findings that are locally and globally relevant. The research was not restricted or prohibited in the setting of the researchers and does not result in stigmatization, incrimination, discrimination or personal risk to participants. Local and regional research relevant to our study was taken into account in citations. Competing interests: The authors declare no competing interests.
Figures
References
-
- Fraenkel, G. S. & Gunn, D. L. The Orientation of Animals, Kineses, Taxes and Compass Reactions. (Dover, 1961).
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
