

Deep reinforcement learning enhanced PID control for hydraulic servo systems in injection molding machines
- PMID: 40596206
- PMCID: PMC12218981
- DOI: 10.1038/s41598-025-05904-2
Deep reinforcement learning enhanced PID control for hydraulic servo systems in injection molding machines
Abstract
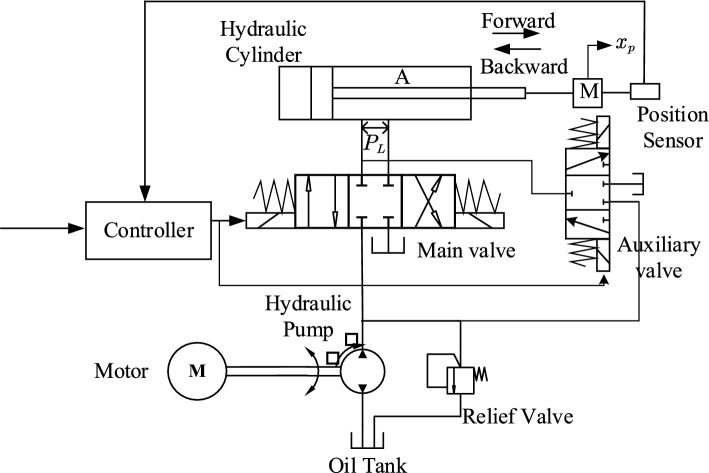
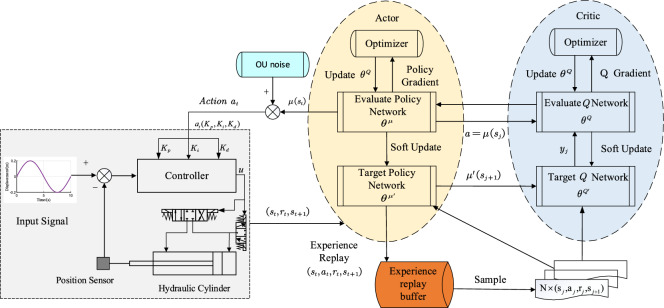
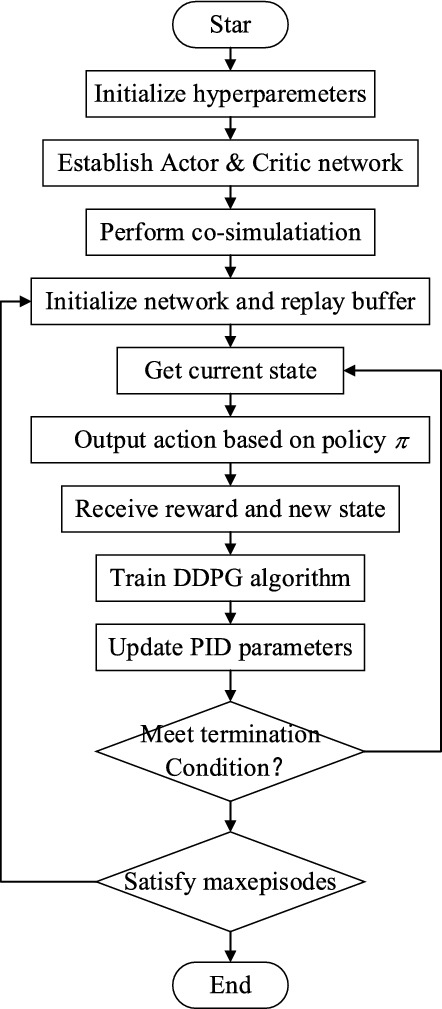
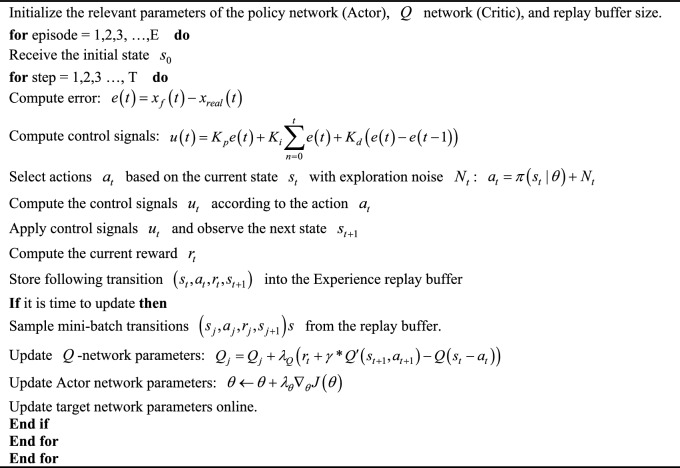
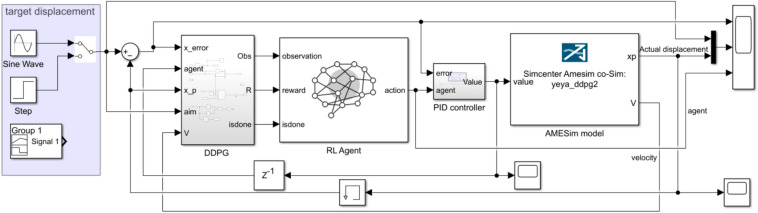
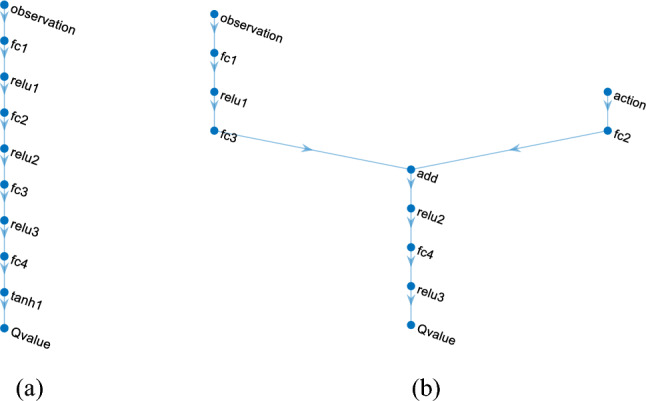
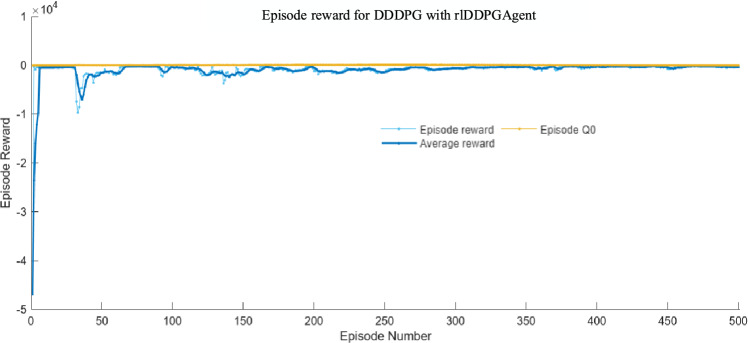
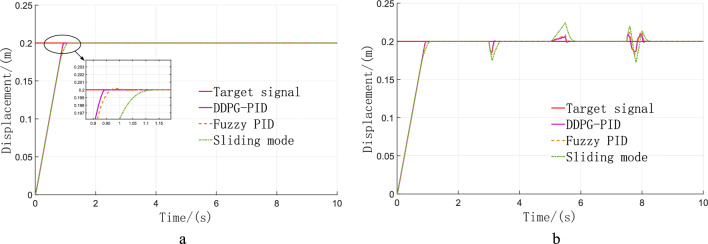
To address the issue of insufficient position control accuracy in the servo-hydraulic system of injection molding machines under nonlinear characteristics and external disturbances, this paper proposes a novel adaptive PID control strategy enhanced by the Deep Deterministic Policy Gradient (DDPG) algorithm. An auxiliary servo valve is introduced to improve flow capacity and enhance the system's dynamic response performance. Meanwhile, the DDPG algorithm is utilized to adjust the PID parameters in real time based on tracking errors and system state feedback, thereby improving the controller's adaptability to time-varying operating conditions. Compared with traditional control methods, the proposed strategy demonstrates superior tracking accuracy, faster convergence, and stronger robustness. In particular, this work innovatively integrates the DDPG algorithm with an auxiliary servo valve structure for PID parameter optimization and dynamic performance enhancement, offering new ideas and technical pathways for adaptive control of complex hydraulic systems.
Keywords: Adaptive control; DDPG; Intelligent control; Position control; Reinforcement learning; Servo hydraulic system.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures





Similar articles
-
Deep Reinforcement Learning-Based Self-Optimization of Flow Chemistry.ACS Eng Au. 2025 May 13;5(3):247-266. doi: 10.1021/acsengineeringau.5c00004. eCollection 2025 Jun 18. ACS Eng Au. 2025. PMID: 40556644 Free PMC article.
-
Research on channel estimation based on joint perception and deep enhancement learning in complex communication scenarios.PeerJ Comput Sci. 2025 May 8;11:e2852. doi: 10.7717/peerj-cs.2852. eCollection 2025. PeerJ Comput Sci. 2025. PMID: 40567773 Free PMC article.
-
Adaptive distributed stochastic deep reinforcement learning control for voltage and frequency restoration in islanded AC microgrids with communication noise and delay.Sci Rep. 2025 Jul 27;15(1):27315. doi: 10.1038/s41598-025-13010-6. Sci Rep. 2025. PMID: 40717144 Free PMC article.
-
Health professionals' experience of teamwork education in acute hospital settings: a systematic review of qualitative literature.JBI Database System Rev Implement Rep. 2016 Apr;14(4):96-137. doi: 10.11124/JBISRIR-2016-1843. JBI Database System Rev Implement Rep. 2016. PMID: 27532314
-
A review: Lightweight architecture model in deep learning approach for lung disease identification.Comput Biol Med. 2025 Aug;194:110425. doi: 10.1016/j.compbiomed.2025.110425. Epub 2025 Jun 14. Comput Biol Med. 2025. PMID: 40517598 Review.
References
-
- Le, V. D. et al. Computational study on the clamping mechanism in the injection molding machine. Int. J. Adv. Manuf. Technol.121(11), 7247–7261 (2022).
-
- Ren, Z. et al. A learning-based model predictive control scheme for injection speed tracking in injection molding process. Complex Intell. Syst.10(6), 7845–7861 (2024).
-
- Wang, W. et al. Output feedback control for energy-saving asymmetric hydraulic servo system based on desired compensation approach. Appl. Math. Model.101, 360–379 (2022).
-
- Ren, Z. et al. Dynamic optimal control of flow front position in injection molding process: A control parameterization-based method. J. Process Control132, 103125 (2023).
-
- Hu, H. et al. Practical adaptive robust tracking control of the dual-valve parallel electro-hydraulic servo system with reduced-order model. Trans. Inst. Meas. Control.46(3), 501–512 (2024).
Grants and funding
LinkOut - more resources
Full Text Sources
