

Case study on force compliant robot arm controller for nasopharyngeal swab insertion
- PMID: 40603441
- PMCID: PMC12223138
- DOI: 10.1038/s41598-025-06032-7
Case study on force compliant robot arm controller for nasopharyngeal swab insertion
Abstract
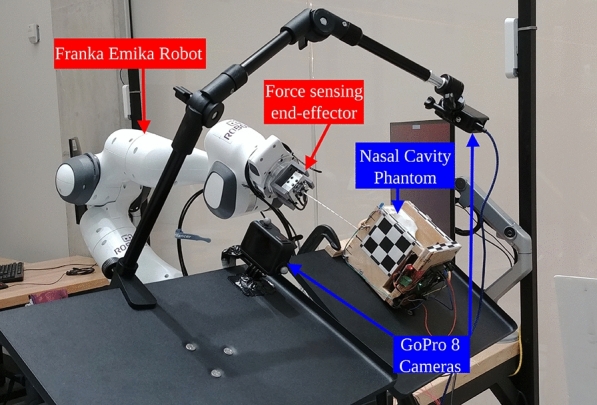
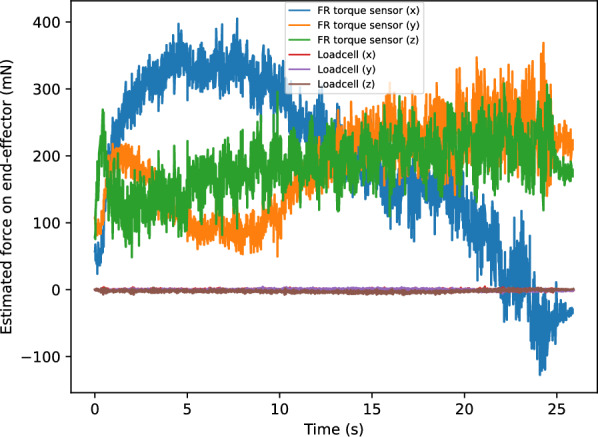
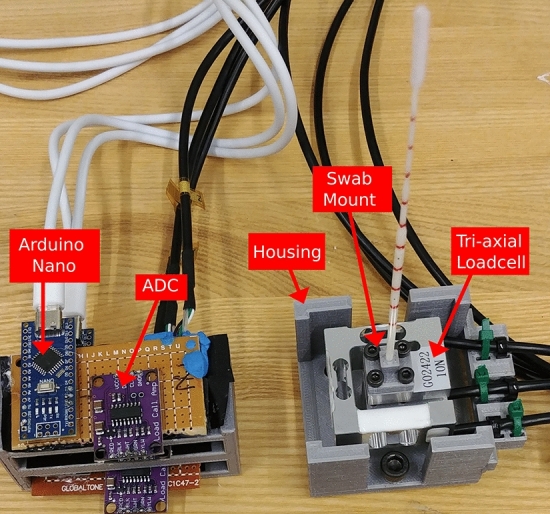
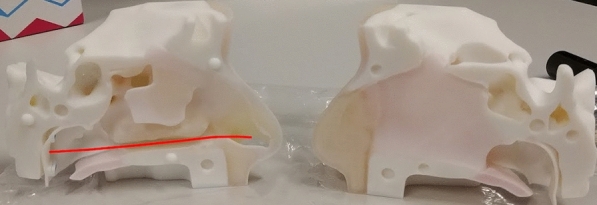
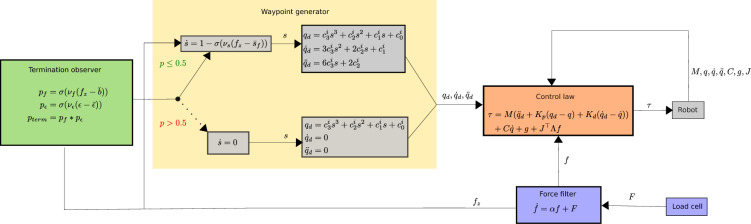
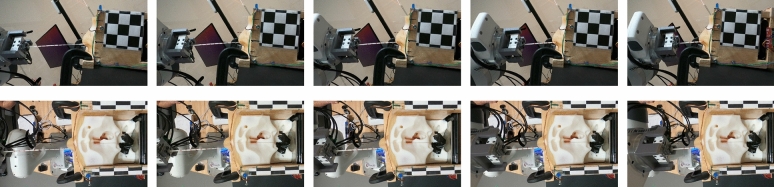
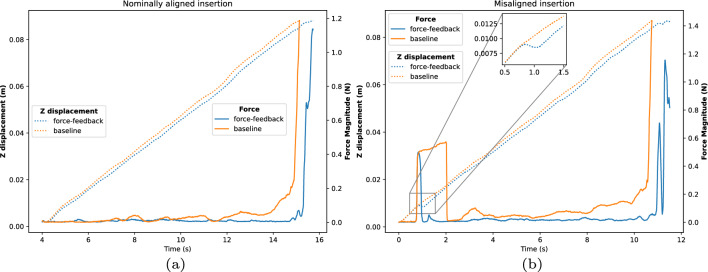
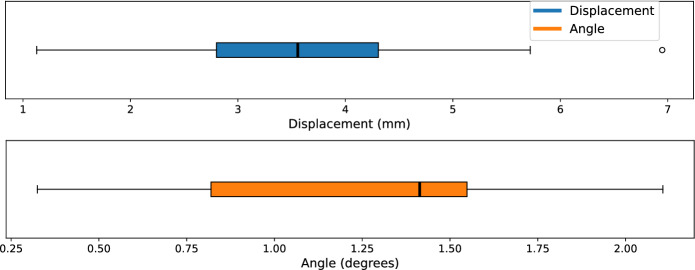
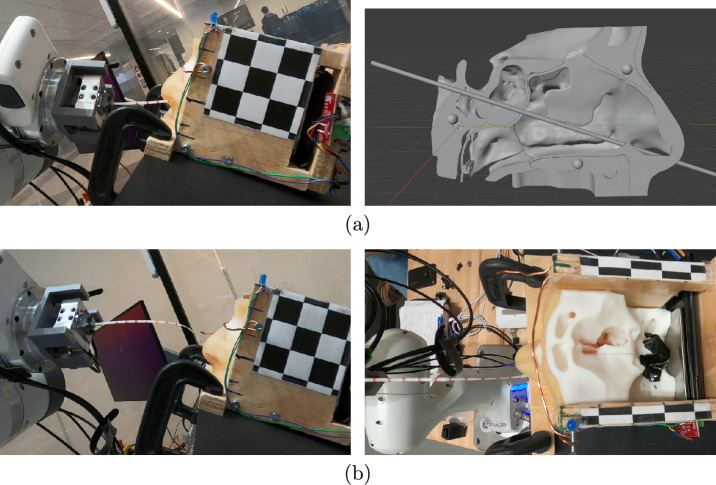
The nasopharyngeal (NP) swab sample test, commonly used to detect COVID-19 and other respiratory illnesses, involves moving a swab through the nasal cavity to collect samples from the nasopharynx. While typically this is done by human healthcare workers, there is a significant societal interest to enable robots to do this test to reduce exposure to patients and to free up human resources. The task is challenging from the robotics perspective because of the dexterity and safety requirements. While other works have implemented specific hardware solutions, our research differentiates itself by using a ubiquitous rigid robotic arm. This work presents a case study where we investigate the strengths and challenges using compliant control system to accomplish NP swab tests with such a robotic configuration. To accomplish this, we designed a force sensing end-effector that integrates with the proposed torque controlled compliant control loop. We then conducted experiments where the robot inserted NP swabs into a 3D printed nasal cavity phantom. Ultimately, we found that the compliant control system outperformed a basic position controller and shows promise for human use. However, further efforts are needed to ensure the initial alignment with the nostril and to address head motion.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors report no competing interests.
Figures
Similar articles
-
Performance of Saliva, Oropharyngeal Swabs, and Nasal Swabs for SARS-CoV-2 Molecular Detection: a Systematic Review and Meta-analysis.J Clin Microbiol. 2021 Apr 20;59(5):e02881-20. doi: 10.1128/JCM.02881-20. Print 2021 Apr 20. J Clin Microbiol. 2021. PMID: 33504593 Free PMC article.
-
Signs and symptoms to determine if a patient presenting in primary care or hospital outpatient settings has COVID-19.Cochrane Database Syst Rev. 2022 May 20;5(5):CD013665. doi: 10.1002/14651858.CD013665.pub3. Cochrane Database Syst Rev. 2022. PMID: 35593186 Free PMC article.
-
Rapid, point-of-care antigen tests for diagnosis of SARS-CoV-2 infection.Cochrane Database Syst Rev. 2022 Jul 22;7(7):CD013705. doi: 10.1002/14651858.CD013705.pub3. Cochrane Database Syst Rev. 2022. PMID: 35866452 Free PMC article.
-
Measures implemented in the school setting to contain the COVID-19 pandemic.Cochrane Database Syst Rev. 2022 Jan 17;1(1):CD015029. doi: 10.1002/14651858.CD015029. Cochrane Database Syst Rev. 2022. Update in: Cochrane Database Syst Rev. 2024 May 2;5:CD015029. doi: 10.1002/14651858.CD015029.pub2. PMID: 35037252 Free PMC article. Updated.
-
Saline gargle collection method is comparable to nasopharyngeal/oropharyngeal swabbing for the molecular detection and sequencing of SARS-CoV-2 in Botswana.Microbiol Spectr. 2025 Jul;13(7):e0202324. doi: 10.1128/spectrum.02023-24. Epub 2025 May 22. Microbiol Spectr. 2025. PMID: 40401962 Free PMC article.
References
-
- Kaiser, M. S., Mamun, S. A., Mahmud, M. & Tania, M. H. Healthcare Robots to Combat COVID-19, 83–97 (Springer Singapore, 2021).
MeSH terms
Grants and funding
- CGS-D/Gouvernement du Canada | Natural Sciences and Engineering Research Council of Canada (Conseil de Recherches en Sciences Naturelles et en Génie du Canada)
- EEF/University of Waterloo
- Human-Centered Robotics and Machine Intelligence/Canada Excellence Research Chairs, Government of Canada (Canada Excellence Research Chairs Program)
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
