

InvSim algorithm for pre-computing airplane flight controls in limited-range autonomous missions, and demonstration via double-roll maneuver of Mirage III fighters
- PMID: 40603517
- PMCID: PMC12222780
- DOI: 10.1038/s41598-025-07639-6
InvSim algorithm for pre-computing airplane flight controls in limited-range autonomous missions, and demonstration via double-roll maneuver of Mirage III fighters
Abstract
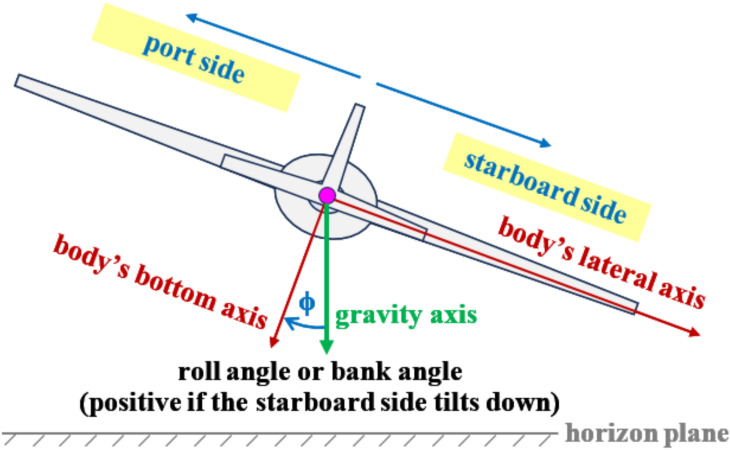
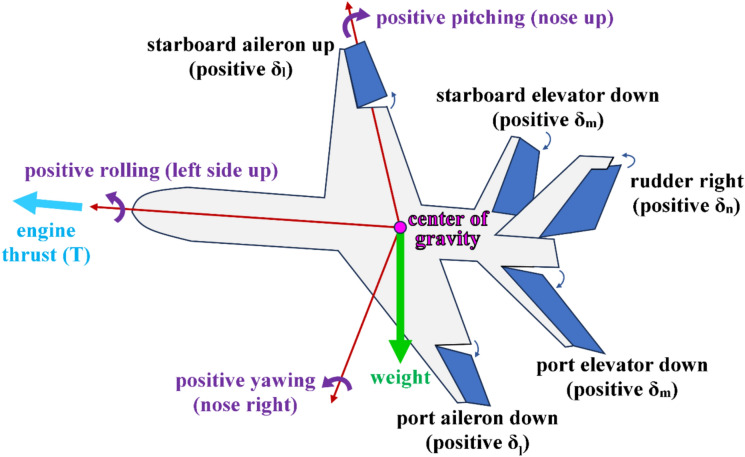
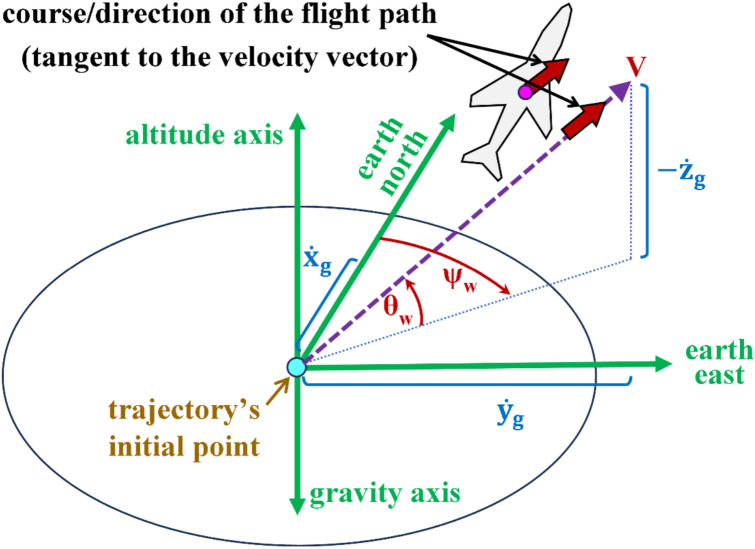
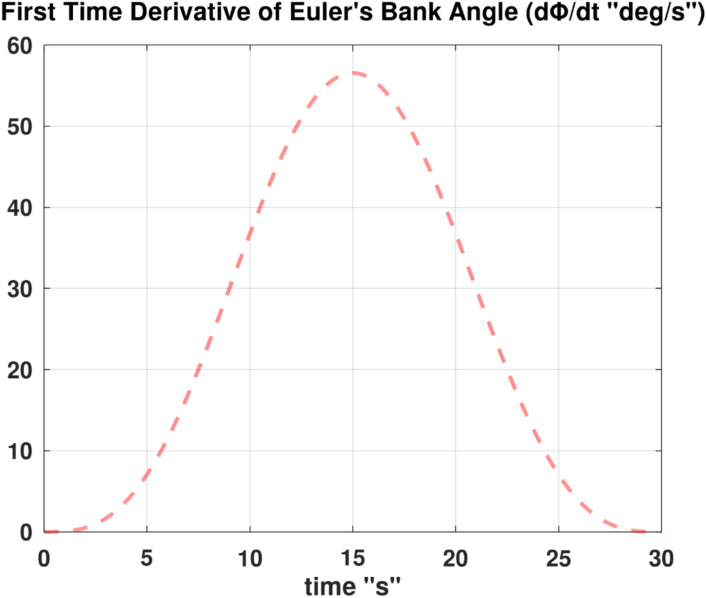
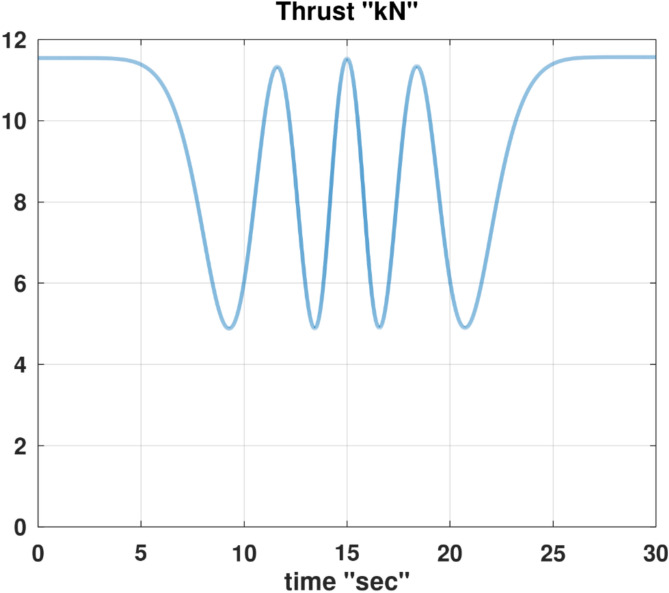
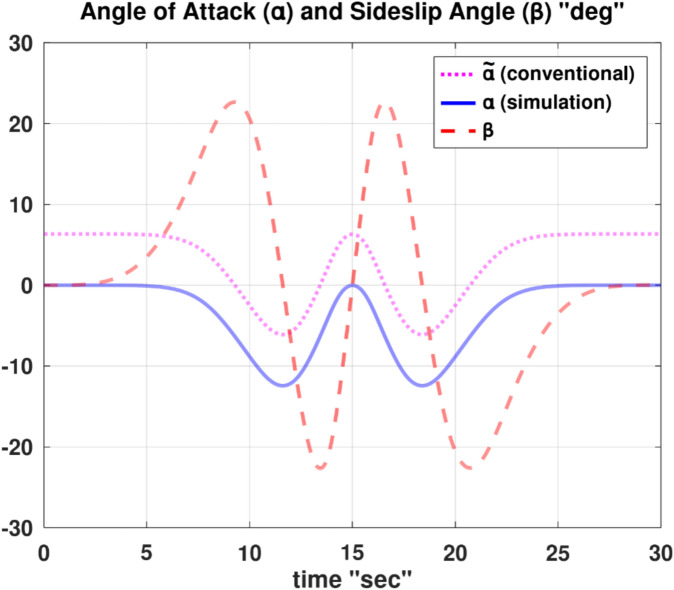
In this work, we start with a generic mathematical framework for the equations of motion (EOM) in flight mechanics with six degrees of freedom (6-DOF) for a general (not necessarily symmetric) fixed-wing aircraft. This mathematical framework incorporates (1) body axes (fixed in the airplane at its center of gravity), (2) inertial axes (fixed in the earth/ground at the take-off point), wind axes (aligned with the flight path/course), (3) spherical flight path angles (azimuth angle measured clockwise from the geographic north, and elevation angle measured above the horizon plane), and (4) spherical flight angles (angle of attack and sideslip angle). We then manipulate these equations of motion to derive a customized version suitable for inverse simulation flight mechanics, where a target flight trajectory is specified while a set of corresponding necessary flight controls to achieve that maneuver are predicted. We then present a numerical procedure for integrating the developed inverse simulation (InvSim) system in time; utilizing (1) symbolic mathematics, (2) explicit fourth-order Runge-Kutta (RK4) numerical integration technique, and (3) expressions based on the finite difference method (FDM); such that the four necessary control variables (engine thrust force, ailerons' deflection angle, elevators' deflection angle, and rudder's deflection angle) are computed as discrete values over the entire maneuver time, and these calculated control values enable the airplane to achieve the desired flight trajectory, which is specified by three inertial Cartesian coordinates of the airplane, in addition to the Euler's roll angle. We finally demonstrate the proposed numerical procedure of flight mechanics inverse simulation (InvSim) through an example case that is representative of the Mirage III family of French fighter airplanes, in which a straight subsonic flight with a double-roll maneuver over a duration of 30 s at an altitude of 5 km (3.107 mi or 16,404 ft) is inversely simulated.
Keywords: Airplane; FDM; Fixed-wing aircraft; Flight mechanics; Inverse simulation; Maneuver; Mirage III; RK4; Trajectory.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Competing interests: The authors declare no competing interests.
Figures














References
-
- Gamwo, I. K. & Liu, Y. Mathematical modeling and numerical simulation of methane production in a hydrate reservoir. Ind. Eng. Chem. Res.49, 5231–5245. 10.1021/ie901452v (2010).
-
- Makarovskikh, T. A., Panyukov, A. V. & Savitskiy, E. A. Mathematical models and routing algorithms for CAD technological preparation of cutting processes. Autom. Remote Control78, 868–881. 10.1134/S0005117917050095 (2017).
-
- Marzouk, O. A. Radiant heat transfer in nitrogen-free combustion environments. Int. J. Nonlinear Sci. Numer. Simul.19, 175–188. 10.1515/ijnsns-2017-0106 (2018).
-
- Zukowski, M. Mathematical modeling and numerical simulation of a short term thermal energy storage system using phase change material for heating applications. Energy Convers. Manag.48, 155–165. 10.1016/j.enconman.2006.04.017 (2007).
-
- Jaafar, M. A., Rousse, D. R., Gibout, S. & Bédécarrats, J.-P. A review of dendritic growth during solidification: Mathematical modeling and numerical simulations. Renew. Sustain. Energy Rev.74, 1064–1079. 10.1016/j.rser.2017.02.050 (2017).
LinkOut - more resources
Full Text Sources
