

Wristful thinking: exploring the effects of robotic rehabilitation and cross-education for persons with multiple sclerosis
- PMID: 40618053
- PMCID: PMC12229000
- DOI: 10.1186/s12984-025-01684-y
Wristful thinking: exploring the effects of robotic rehabilitation and cross-education for persons with multiple sclerosis
Abstract
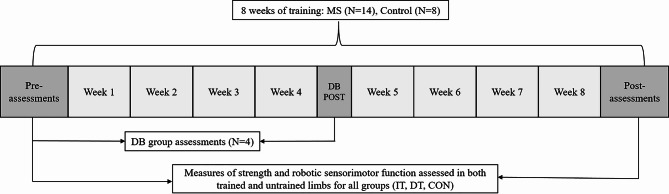
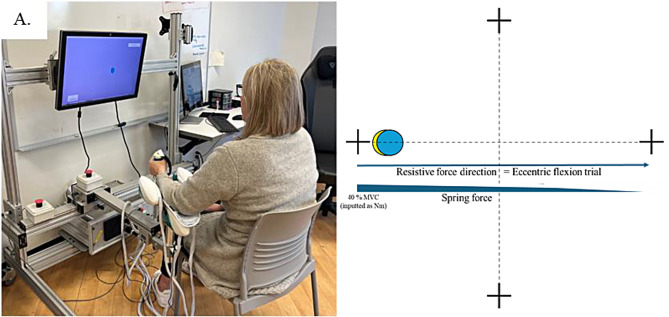
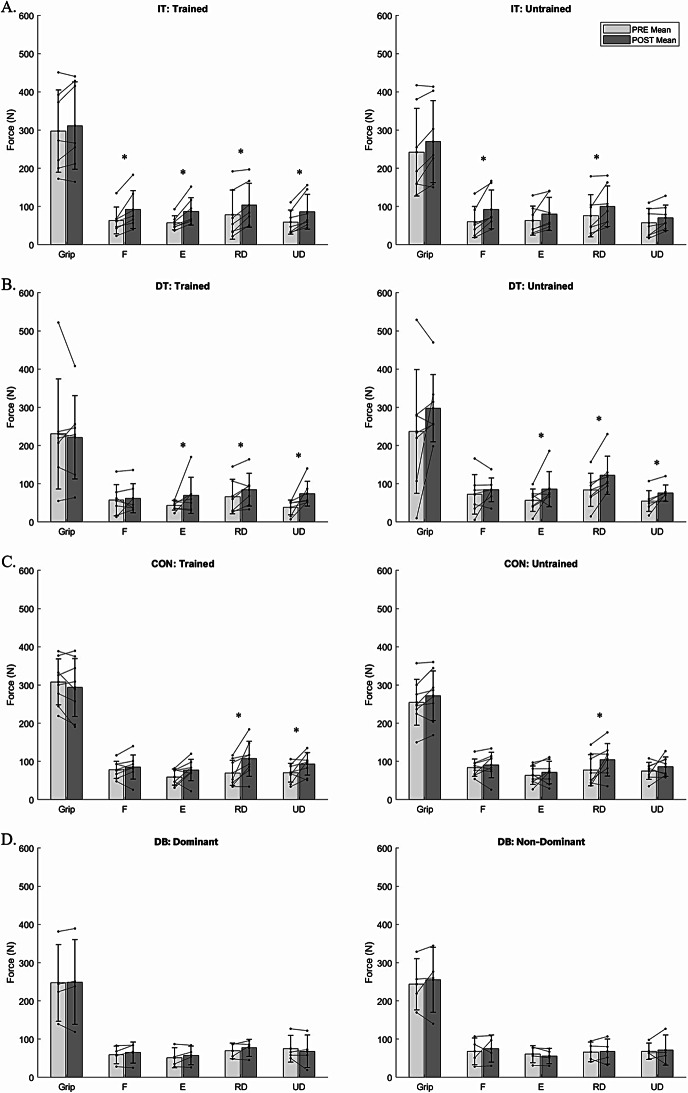
The goal of this work was to develop an adaptive rehabilitation technique using a haptic wrist robot that would induce cross-education to an untrained limb. Fourteen individuals with Multiple Sclerosis (MS) and eight non-affected adults completed an eight-week intervention. MS participants were placed into two groups, training their more affected limb (direct training), and training their less affected limb (indirect training). The purpose of the intervention was to improve wrist and grip strength (measured via maximal grip and isometric wrist strength) and motor control (measured via robotic assessments). Participants trained with the robotic device three times per week for eight consecutive weeks. Training consisted of eccentric contractions as the participant resisted a force elicited from the robotic device as it moved in flexion, extension, and radial-ulnar deviation. The MS group reported significant increases in wrist strength. The indirect training group significantly improved in flexion, extension, radial and ulnar deviation in the trained limb, and flexion and radial deviation in the untrained limb. The direct training group showed improvements in extension and ulnar deviation in both limbs. The control group improved in radial and ulnar deviation, with radial deviation improving in the untrained limb. Grip force remained unchanged for all groups. MS participants significantly decreased tracking and figural error post-intervention suggesting evidence that motor control adaptations occurred following an adaptive and resistive robotic intervention of the upper limb. Results of this work provide evidence that eight-week robotic rehabilitation can elicit cross-education effects to the untrained limb.
Keywords: Cross-education; Multiple sclerosis; Neurorehabilitation; Robotic rehabilitation; Upper extremity.
© 2025. The Author(s).
Conflict of interest statement
Declarations. Ethical approval: The study was approved by the Institutional Review Board of Brock University (REB# 22-005). Consent to Participate: The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article. Competing interests: The authors declare no competing interests.
Figures

Similar articles
-
Effectiveness of robotic assisted rehabilitation for mobility and functional ability in adult stroke patients: a systematic review.JBI Database System Rev Implement Rep. 2017 Dec;15(12):3049-3091. doi: 10.11124/JBISRIR-2017-003456. JBI Database System Rev Implement Rep. 2017. PMID: 29219877
-
The effect of time spent in rehabilitation on activity limitation and impairment after stroke.Cochrane Database Syst Rev. 2021 Oct 25;10(10):CD012612. doi: 10.1002/14651858.CD012612.pub2. Cochrane Database Syst Rev. 2021. PMID: 34695300 Free PMC article.
-
Virtual reality for multiple sclerosis rehabilitation.Cochrane Database Syst Rev. 2025 Jan 7;1(1):CD013834. doi: 10.1002/14651858.CD013834.pub2. Cochrane Database Syst Rev. 2025. PMID: 39775922
-
Neural determinants of the increase in muscle strength and force steadiness of the untrained limb following a 4 week unilateral training.J Physiol. 2025 Jun;603(12):3605-3630. doi: 10.1113/JP288954. Epub 2025 Jun 11. J Physiol. 2025. PMID: 40500979
-
Rehabilitation for distal radial fractures in adults.Cochrane Database Syst Rev. 2015 Sep 25;2015(9):CD003324. doi: 10.1002/14651858.CD003324.pub3. Cochrane Database Syst Rev. 2015. PMID: 26403335 Free PMC article.
References
-
- Weiner HL, Stankiewicz JM. Multiple Sclerosis: Diagnosis and Therapy. Wiley-Blackwell; 2012. http://www.dawsonera.com/depp/reader/protected/external/AbstractView/S97...Accessed 11 Sept 2019.
-
- Larson RD, McCully KK, Larson DJ, Pryor WM, J.White L. Bilateral differences in lower-limb performance in individuals with multiple sclerosis. J Rehabil Res Dev. 2013;50(2):215. 10.1682/JRRD.2011.10.0189. - PubMed
-
- Manca A, Cabboi MP, Dragone D, et al. Resistance training for muscle weakness in multiple sclerosis: direct versus contralateral approach in individuals with ankle dorsiflexors’ disparity in strength. Arch Phys Med Rehabil. 2017;98(7):1348–e13561. 10.1016/j.apmr.2017.02.019. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
