

Optical next generation reservoir computing
- PMID: 40691151
- PMCID: PMC12280216
- DOI: 10.1038/s41377-025-01927-6
Optical next generation reservoir computing
Abstract
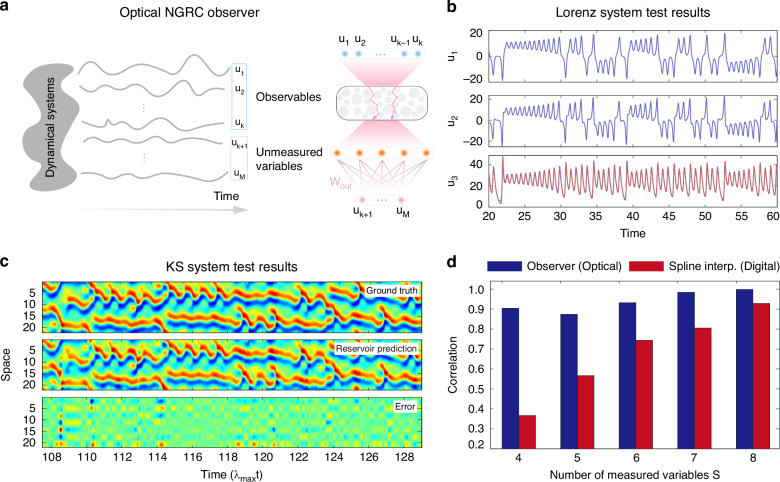
Artificial neural networks with internal dynamics exhibit remarkable capability in processing information. Reservoir computing (RC) is a canonical example that features rich computing expressivity and compatibility with physical implementations for enhanced efficiency. Recently, a new RC paradigm known as next generation reservoir computing (NGRC) further improves expressivity but compromises its physical openness, posing challenges for realizations in physical systems. Here we demonstrate optical NGRC with computations performed by light scattering through disordered media. In contrast to conventional optical RC implementations, we directly and solely drive our optical reservoir with time-delayed inputs. Much like digital NGRC that relies on polynomial features of delayed inputs, our optical reservoir also implicitly generates these polynomial features for desired functionalities. By leveraging the domain knowledge of the reservoir inputs, we show that the optical NGRC not only predicts the short-term dynamics of the low-dimensional Lorenz63 and large-scale Kuramoto-Sivashinsky chaotic time series, but also replicates their long-term ergodic properties. Optical NGRC shows superiority in shorter training length and fewer hyperparameters compared to conventional optical RC based on scattering media, while achieving better forecasting performance. Our optical NGRC framework may inspire the realization of NGRC in other physical RC systems, new applications beyond time-series processing, and the development of deep and parallel architectures broadly.
© 2025. The Author(s).
Conflict of interest statement
Conflict of interest: The authors declare no competing interests.
Figures



References
-
- Werbos, P. J. Backpropagation through time: what it does and how to do it. Proc. IEEE78, 1550–1560 (1990).
-
- Jaeger, H. & Haas, H. Harnessing nonlinearity: predicting chaotic systems and saving energy in wireless communication. Science304, 78–80 (2004). - PubMed
-
- Pathak, J. et al. Model-free prediction of large spatiotemporally chaotic systems from data: a reservoir computing approach. Phys. Rev. Lett.120, 024102 (2018). - PubMed
Grants and funding
- P2ELP2_199825/Schweizerischer Nationalfonds zur Förderung der Wissenschaftlichen Forschung (Swiss National Science Foundation)
- LION/Schweizerischer Nationalfonds zur Förderung der Wissenschaftlichen Forschung (Swiss National Science Foundation)
- 623B2064/National Natural Science Foundation of China (National Science Foundation of China)
- 62275137/National Natural Science Foundation of China (National Science Foundation of China)
- SMARTIES-724473/EC | EU Framework Programme for Research and Innovation H2020 | H2020 Priority Excellent Science | H2020 European Research Council (H2020 Excellent Science - European Research Council)
LinkOut - more resources
Full Text Sources
